

Device for reinforcing loading capacity of joint robot and control method thereof
A technology of robots and joints, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve problems such as damage to guide rails, rollover, etc., and achieve the effect of preventing the sudden change of the rotation axis and improving the towing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
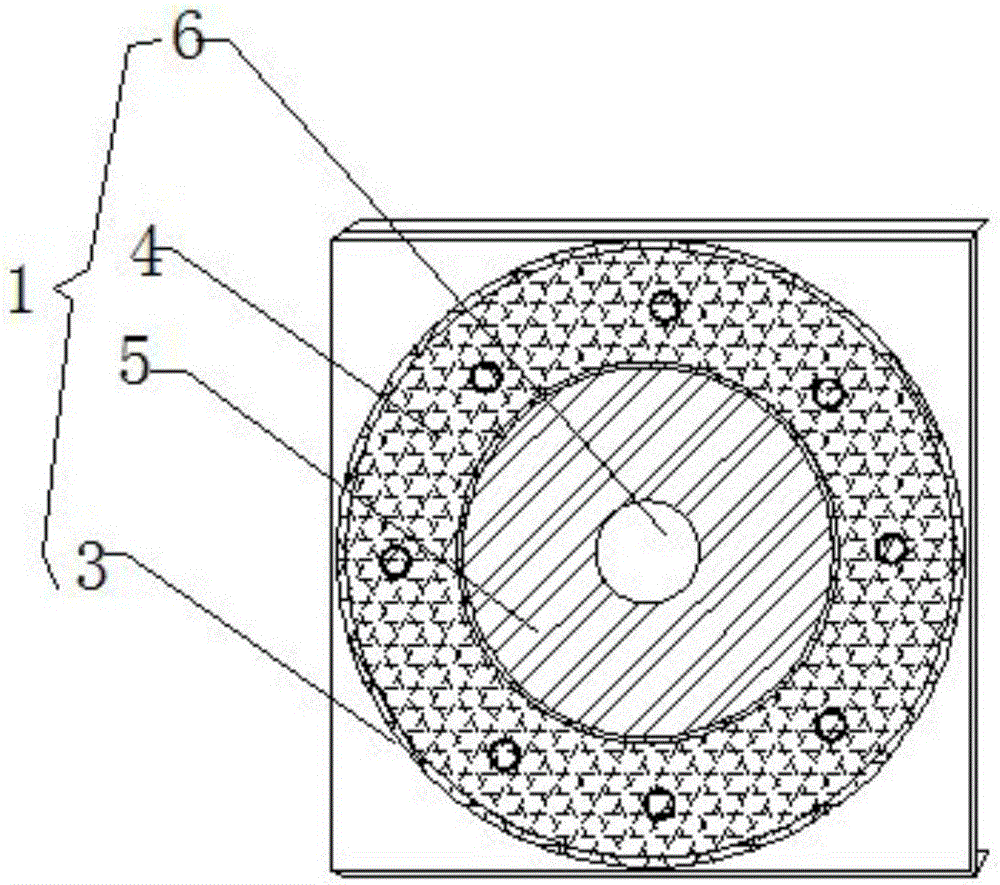
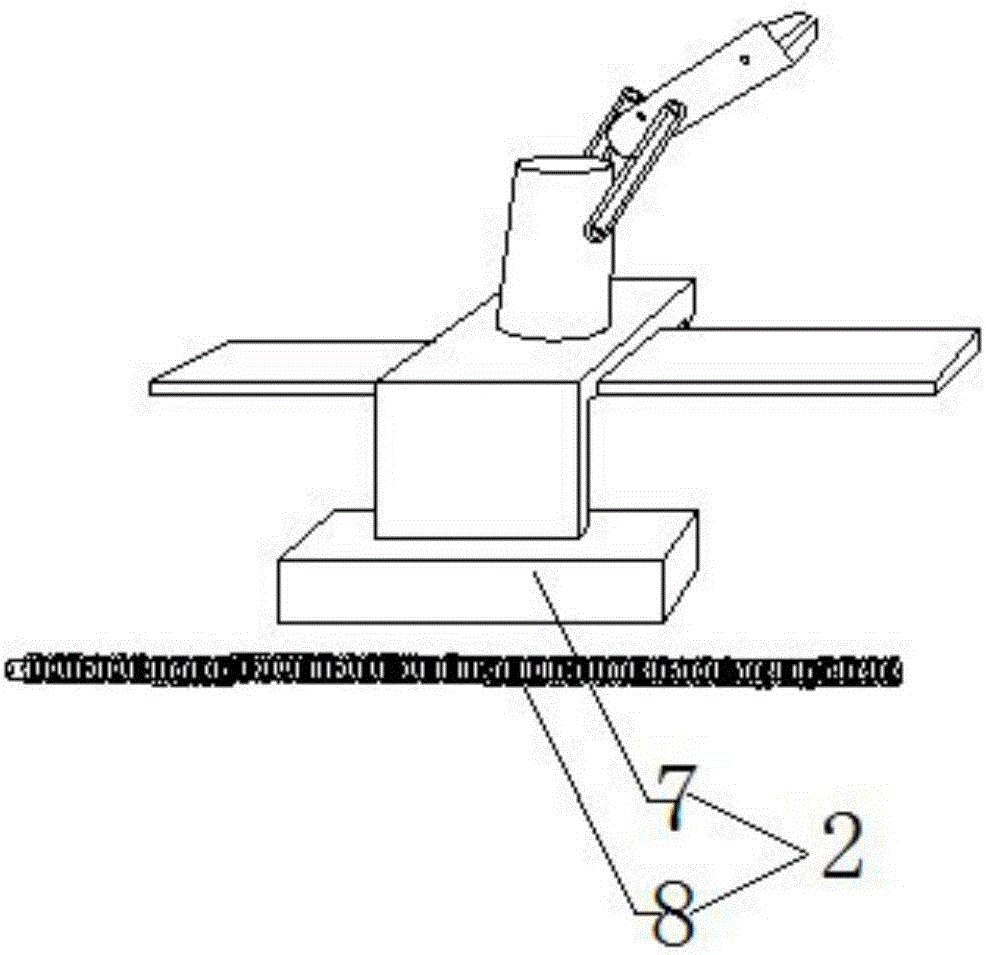
[0017] Such as figure 1 and figure 2 As shown, the present invention is used to enhance the load-bearing capacity of the joint robot, including the joint rotation axis load-bearing one-way motion device 1 and the load-bearing chassis counterweight device 2, and the joint rotation axis load-bearing one-way motion device 1 includes a joint rotation axis load-bearing one-way motion device 1 that is compatible with the joint robot rotation axis The internal gear part 3 installed on the outside, and the intermediate gear part 4 installed on the inside of the internal gear part with the joint robot rotating shaft, and the external gear part 5 arranged on the inside of the intermediate gear part; the outside of the intermediate gear part 4 and The inner sides are provided with meshing gear grooves (not shown); the external gear 5 is installed in cooperation with the driving motor 6; the load-bearing chassis counterweight device 2 includes a magnetic block 7 installed on one side of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More