

Multifunctional robot capable of flying in disaster scene
A robot and multi-functional technology, applied in the field of search and rescue devices, can solve problems such as weak ability to overcome obstacles, inability to rescue, and insufficient intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
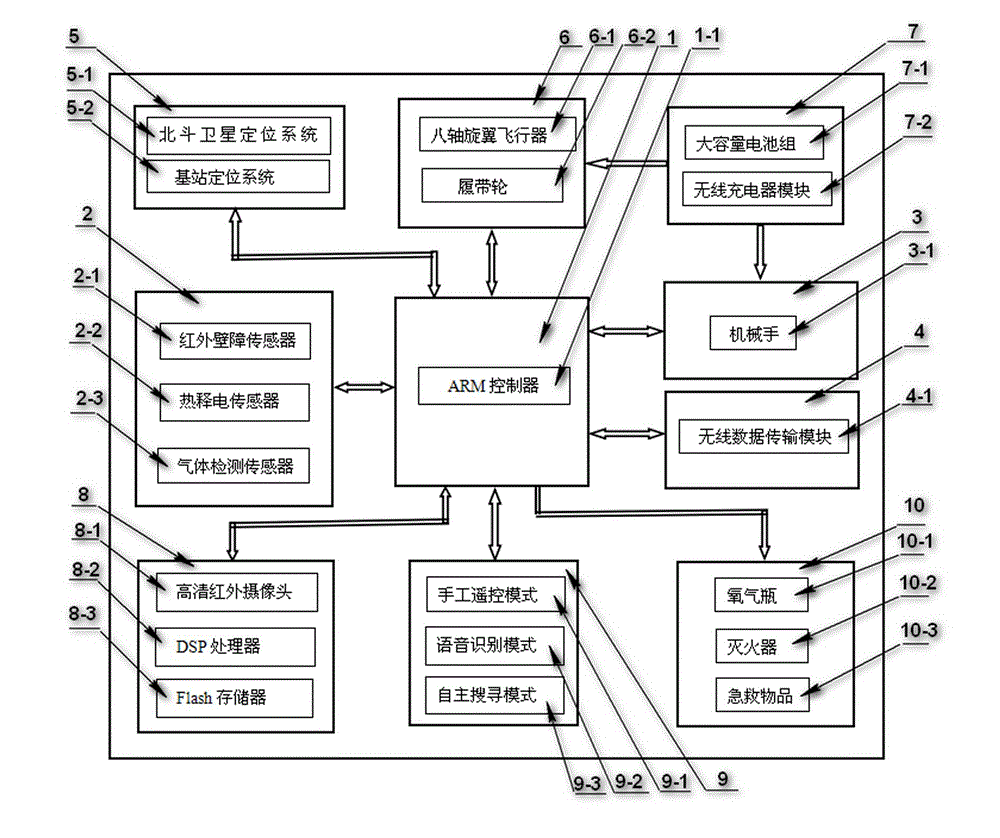
[0035] After the disaster, the eight-axis rotorcraft 6-1 provides forward power to fly to the disaster area. After flying to the disaster area, it can be changed to two motion modes of the track wheel 6-2 and the eight-axis rotor 6-1. Task. The large-capacity battery pack 7-1 provides power for the eight-axis rotorcraft 6-1 and the tracked wheels 6-2 respectively.
[0036] After the robot arrives at the disaster area, the perception module 2 provides the tactile information of the robot, including the infrared barrier sensor 2-1 for judging the obstacles in the process of traveling, and the pyroelectric sensor 2-2 for detecting the human body. Electric sensor 2-2 rotates, thereby can guarantee that pyroelectric sensor 2-2 and human body have relative motion all the time, thereby can detect static and moving human body. The gas detection sensor 2-3 detects gases such as carbon dioxide, carbon monoxide, and methane in the disaster site.
[0037] After the robot arrives at the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More