

Underwater robot communication docking system, underwater robot and cluster control system
An underwater robot and cluster control technology, which is applied to underwater operation equipment, program-controlled manipulators, manipulators, etc., can solve problems such as difficult to complete cooperation and consume a lot of manpower and material resources, so as to improve the efficiency of underwater travel and reduce power consumption. , the effect of prolonging the battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] Such as figure 1 As shown, the present embodiment 1 provides a communication docking system for an underwater robot, including:
[0034] A processor module, a communication device connected to the processor module; wherein the underwater robot communication network is constructed through the communication device to realize the tracking and / or positioning and / or aggregation of the underwater robot.
[0035] Optionally, the communication method of the underwater robot is, for example but not limited to, a three-stage step-by-step approach, that is, three communication technologies are used in the process of the two robots gradually approaching, which has the characteristics of high efficiency, high intelligence, and high stability . Specifically, the complex approaching process is divided into three different stages according to the characteristics of the respective communication according to the three communication methods, and three different stages are used according ...
Embodiment 2
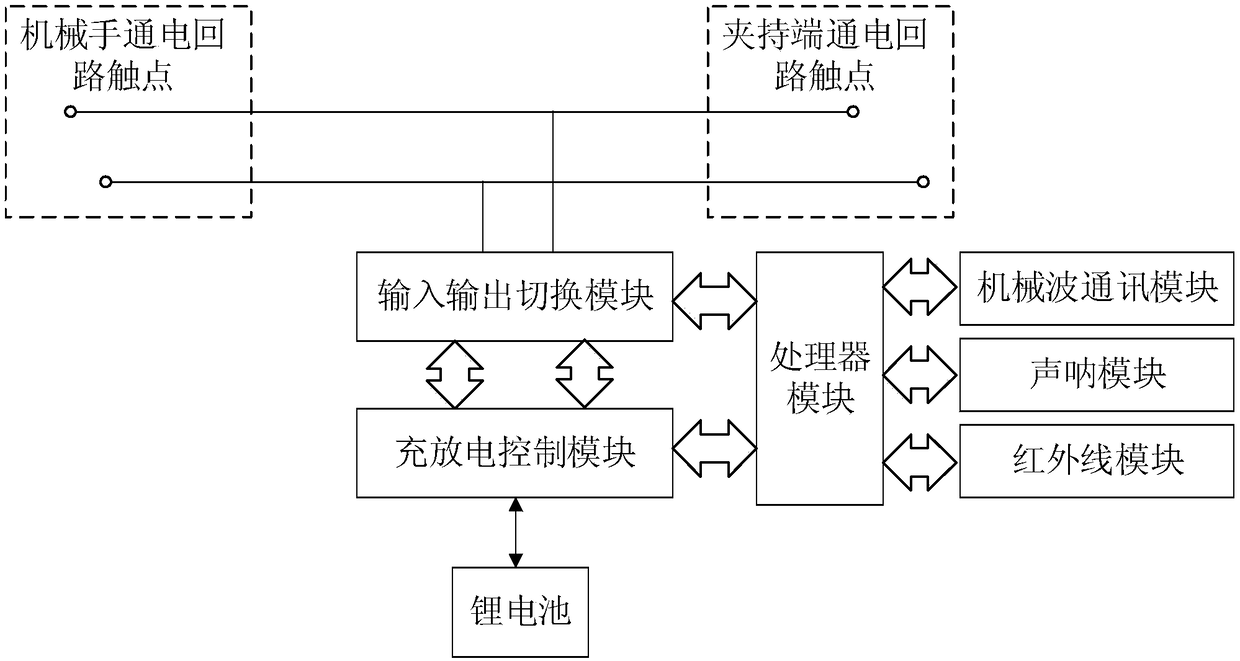
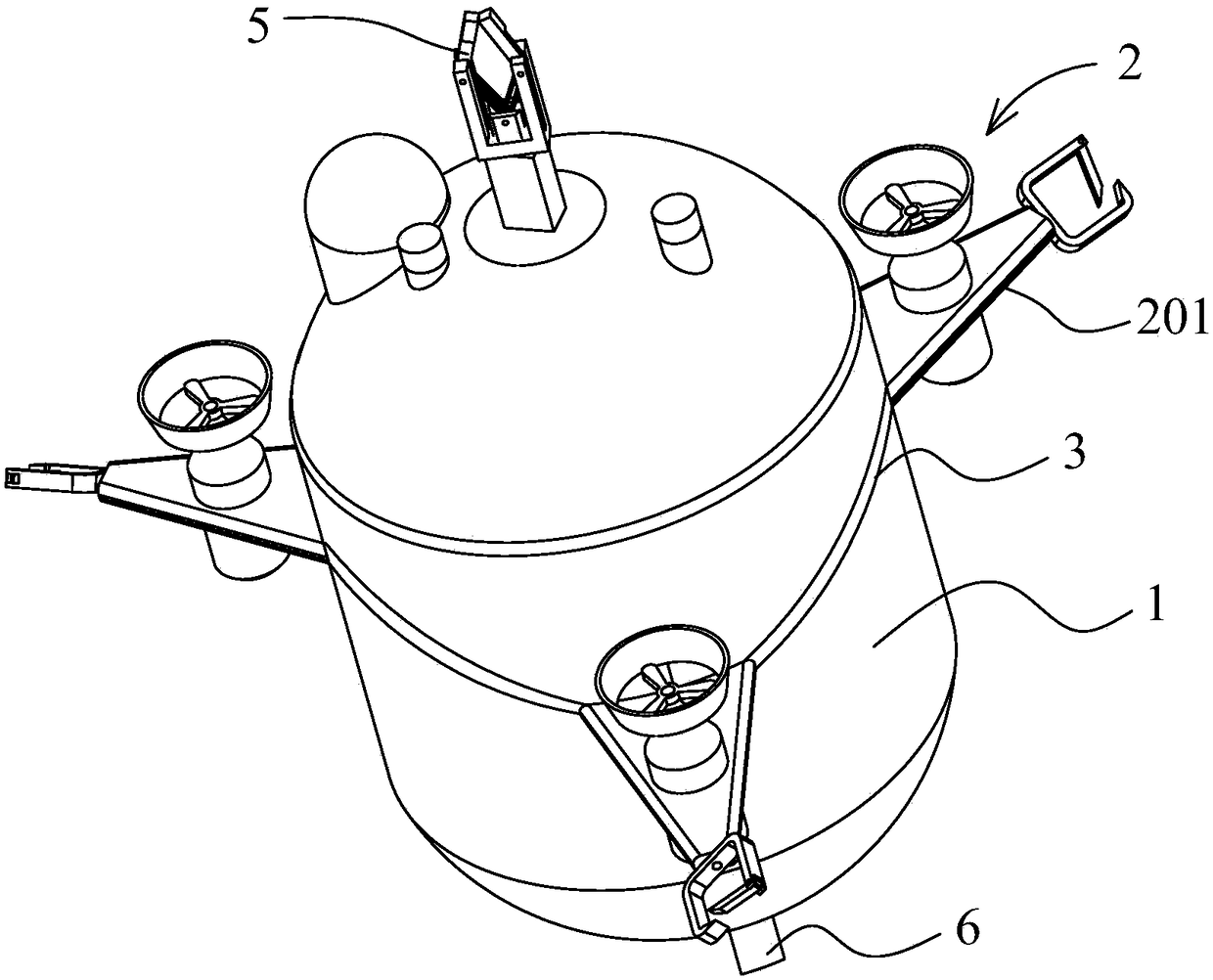
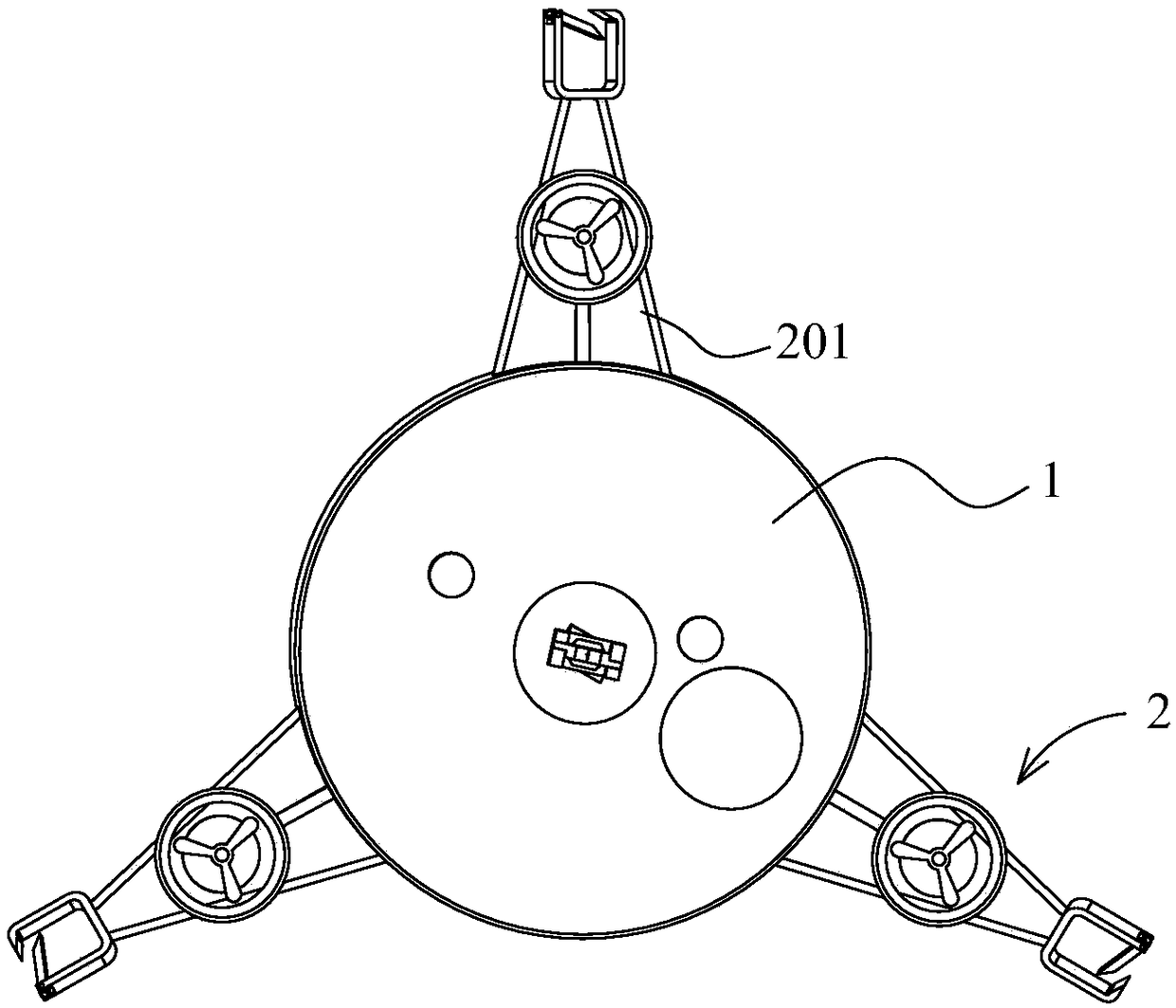
[0040] Such as figure 1 As shown, on the basis of Embodiment 1, this Embodiment 2 provides an underwater robot. The head end of the underwater robot is provided with a manipulator, and the end is provided with a clamping end, and the underwater robot is provided with a charging and discharging control device. module; wherein the manipulator and the clamping end are provided with energized circuit contacts, and each energized circuit contact is connected to the charge and discharge control module; the charge and discharge control module is suitable for controlling the underwater robot through the corresponding energized circuit contacts. The internal lithium battery is charged or discharged.
[0041] The charge and discharge control module includes, but is not limited to, LT1513, FS1610, and a control chip TPS2419, for example.
[0042] Specifically, the charging and discharging control module is connected to the connection line of the energized circuit contact through the inp...
Embodiment 3
[0056] Such as Figure 7 to Figure 9 As shown, Embodiment 3 also provides a swarm control system, including at least two underwater robots as described in Embodiment 2, and a server (located on the mother ship) for coordinating the work of each robot.
[0057] Each underwater robot is suitable for carrying out search activities in their respective activity areas. When one of the underwater robots finds the target, it sends the target position to the server, and the server notifies each underwater robot; The current position of the robot (for example Figure 7 A and B in A) determine a convergence point with the target position (such as Figure 7 Middle y), that is, the server notifies each underwater robot to travel to the meeting point for rendezvous, and queues to the target location (such as Figure 7 shown by x). Where the confluence path is as Figure 7 As shown by the dotted line in the middle, the path from the convergence point y to the target point x is carried ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More