A navigation system and method for autonomous charging of a robot
An autonomous charging and navigation system technology, applied in the field of navigation, can solve the problems of insufficient positioning range, increase the time of response, transmission and reception, and data error, so as to expand the range of positioning, reduce the time of response and wireless transmission, The effect of eliminating errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention is described in detail below in conjunction with accompanying drawing:
[0044] A navigation system for autonomous charging of a robot, characterized in that it includes a transmitting end and a receiving end, the transmitting end includes a signal emission control unit and a signal transmitter unit, and the receiving end includes a signal processing unit and a signal receiving unit;
[0045] The signal transmission control unit includes at least one trigger signal control and generation module, which is used to control the generation and transmission rate of the ultrasonic signal;
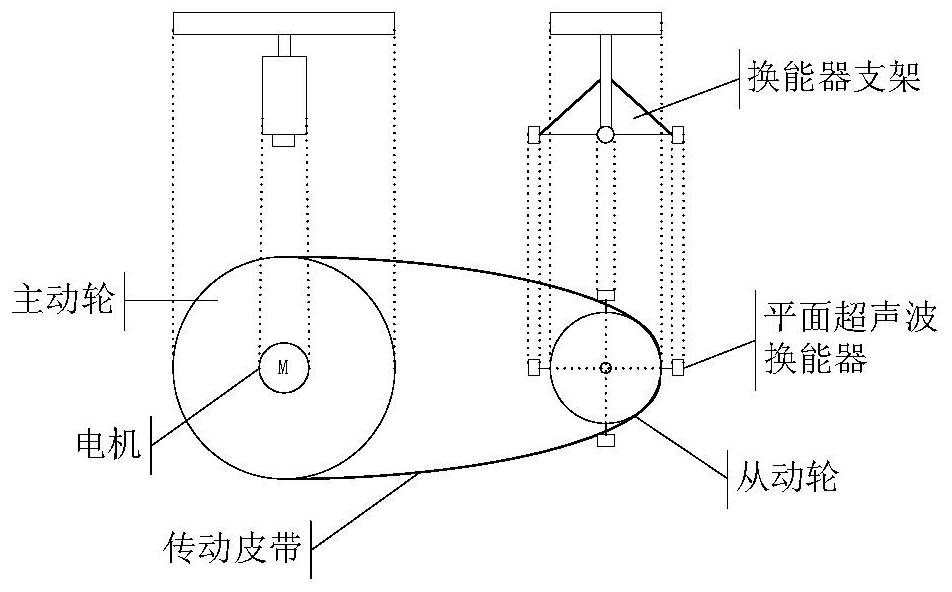
[0046] The signal emission control unit is also connected with the motor drive module, and the motor drive module is used to drive the motor to rotate at a constant speed under the control of the signal emission control unit;
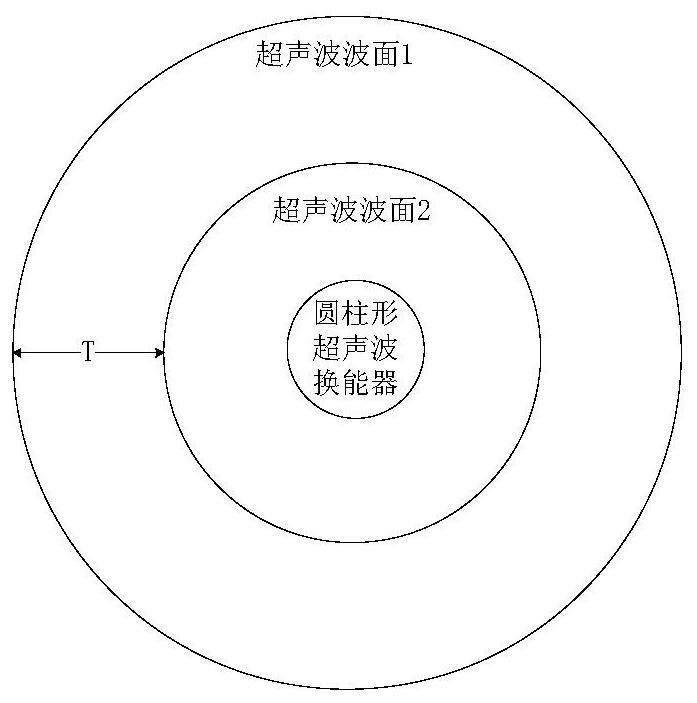
[0047] The signal transmitting unit includes an ultrasonic transducer for converting the current signal into an ultrasonic signal;
[0048] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More