

Field robot binocular vision navigation method and system
A binocular vision and navigation method technology, applied in the field of robot vision, can solve the problems of insufficient navigation stability and low robustness, and achieve the effect of improving real-time performance and reducing the impact of noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043]In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0044] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
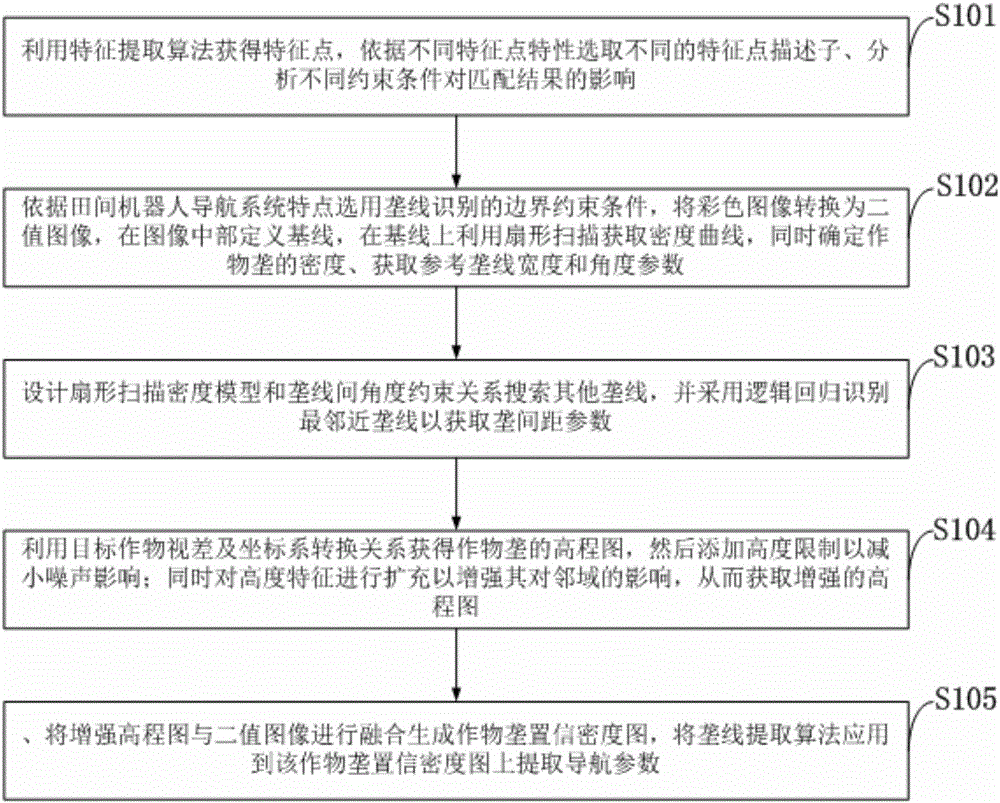
[0045] The present invention is realized like this, as figure 1 As shown, a field robot binocular vision navigation method, including:
[0046] S101. Using a feature extraction algorithm to obtain feature points, select different feature point descriptors according to different feature point characteristics, and analyze the influence of different constraints on matching results;
[0047] S102. According to the characteristics of the field robot navigation system, select the boundary c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More