

UAV (unmanned aerial vehicle) operator state monitoring system based on multi-sensor fusion
A multi-sensor fusion and monitoring system technology, applied in the field of UAV operator status monitoring system, can solve problems such as operator misjudgment, increased operator workload and operation difficulty, and misoperation, so as to avoid flight accidents, The effect of completing missions safely
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
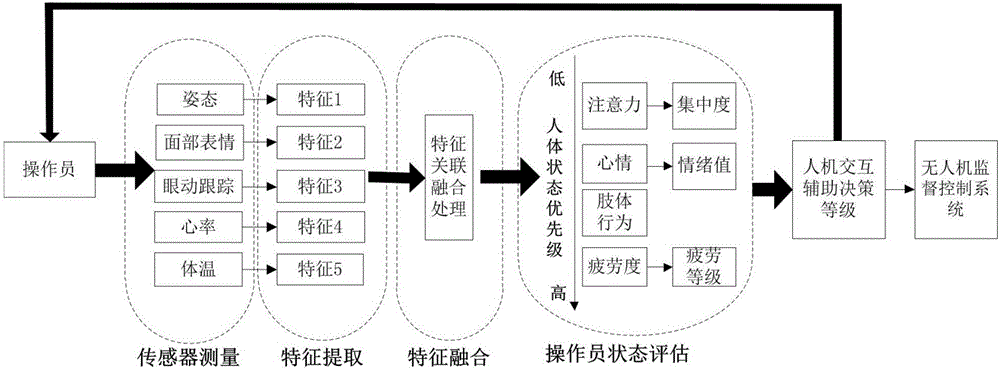
[0031] The present invention aims to design a UAV operator status monitoring system based on multi-sensor fusion. The system can evaluate the working status of the operator in real time, and the evaluation result will be used to calculate the decision-making level of the drone operator, so as to avoid the occurrence of "man-out-of-the-loop" incidents and ensure high efficiency. , Complete mission tasks safely, and provide a basis for better UAV supervision and control.
[0032] The following is based on Figure 1-7 A specific embodiment of the method will be described.
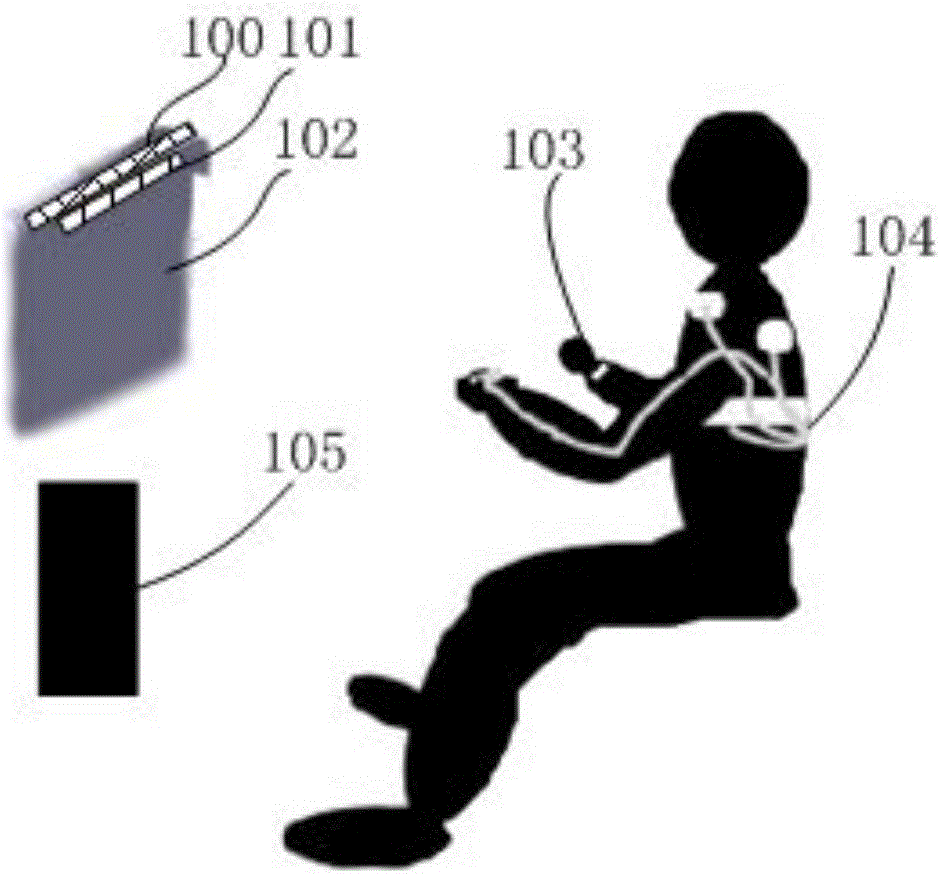
[0033] figure 1 It is the overall flow chart of the system, including various sensors for monitoring the status of the drone, a computer 105 for processing the data collected by various sensors, and a display 102 for displaying and controlling the status of the drone. A var...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More