

Robot curved-surface cutting force control method for solving deformation problem of robot
A control method and robot technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of low machining accuracy, failure to consider robot workpiece assembly errors, and failure to consider the influence of surface cutting feed rate system deformation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
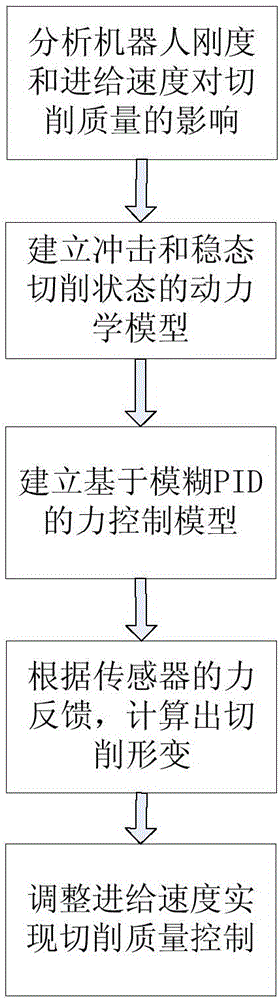
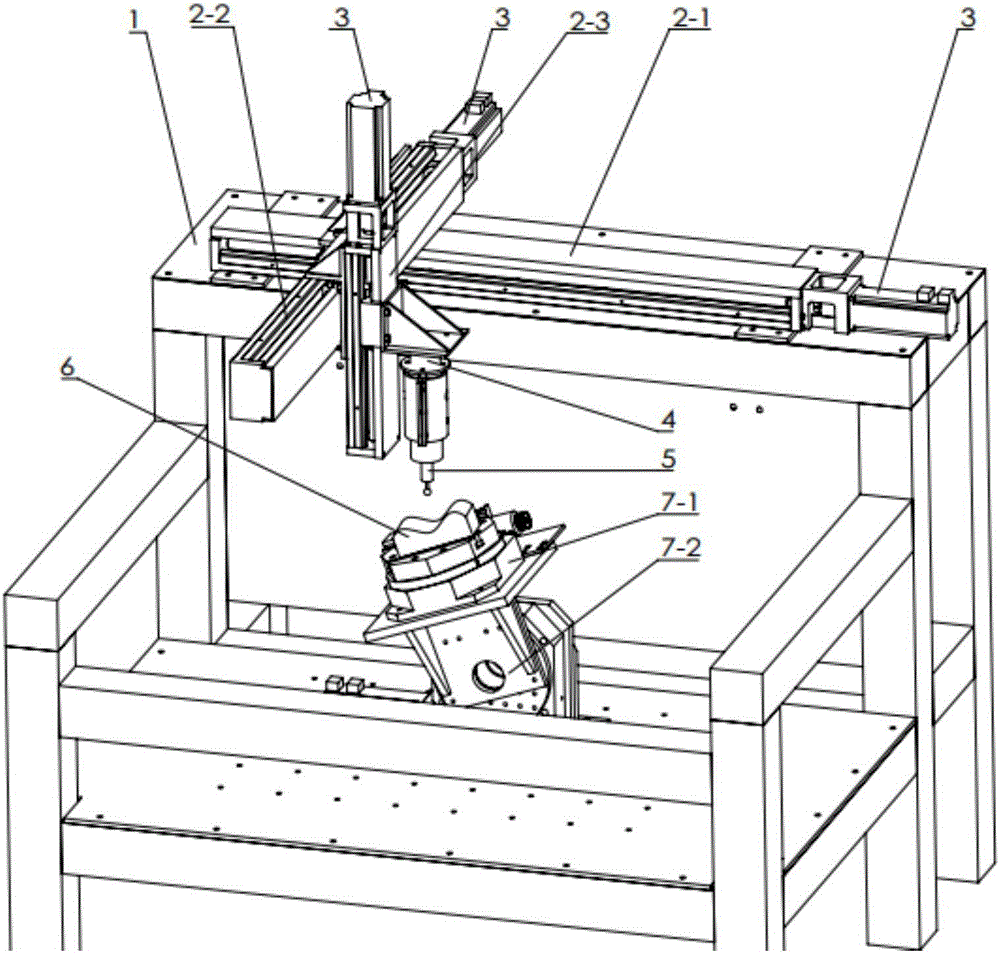
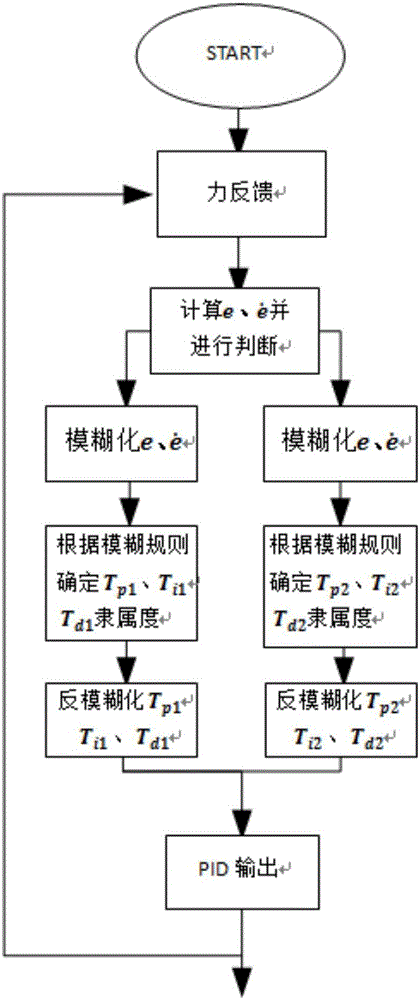
[0037] The present invention aims at the robot curved surface cutting force control method of the robot deformation problem, such as figure 1 As shown, the method first establishes the robot stiffness matrix according to the rectangular coordinate robot cutting system structure, and then divides the cutting process into rigid impact state and stable cutting state according to the complexity of robot cutting, and deduces the robot shock amplitude formula and stability Cutting deformation formula; with cutting force as the control target, the six-dimensional force sensor measures the force on the end of the robot and compares it with the target force, calculates the real-time cutting force error and error change speed, and uses it as control input, and PID parameters as fuzzy inference output , feed speed is taken as the output of PID control, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More