

Automatic guided transport vehicle agv and motion control method and device
A motion control device and automatic guidance technology, applied in the field of logistics, can solve problems such as waste of operating time, low cycle time, difficult parking accuracy, stability and precision, etc., to achieve the effect of improving parking accuracy, reducing time waste, and improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
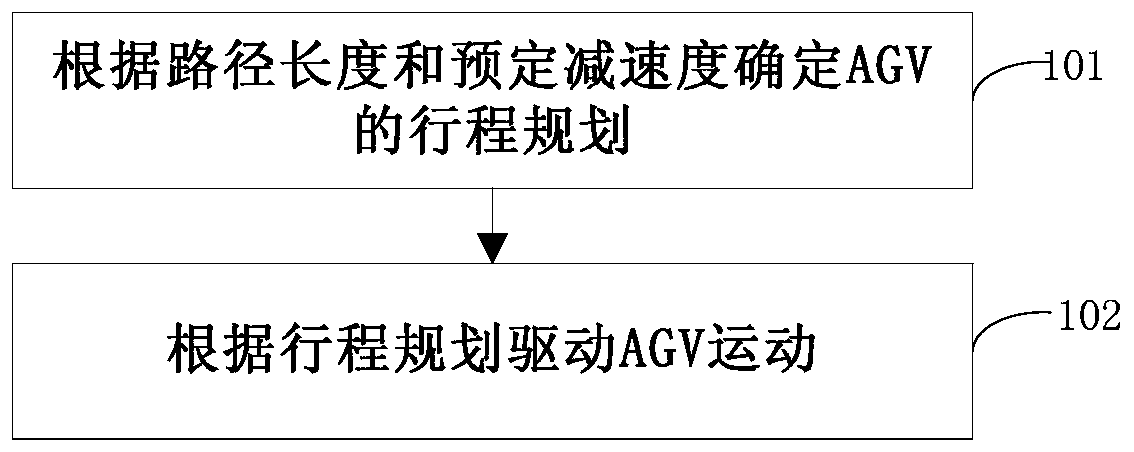
[0039] The flowchart of an embodiment of the AGV motion control method of the present invention is as figure 1 shown.
[0040] In step 101, the travel plan of the AGV is determined according to the path length and the predetermined deceleration. In one embodiment, the planning can be carried out according to the path length and the deceleration of the vehicle, and the travel speed and deceleration distance conforming to the travel length can be set to generate a travel plan. In one embodiment, the maximum travel speed and the deceleration point can be included in the travel plan, so as to ensure that the AGV reaches the destination accurately, while minimizing the time and improving efficiency.
[0041] In step 102, the AGV is driven to move according to the travel plan. In one embodiment, an instruction can be issu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More