

An Optimal Path Planning Method for Incremental Environmental Information Sampling of Indoor Mobile Robots
An optimal path planning, mobile robot technology, applied in non-electric variable control, instruments, motor vehicles, etc., can solve application limitations, computing bottlenecks, inapplicability and other problems, to improve algorithm efficiency and reduce computing time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings and specific implementation examples.
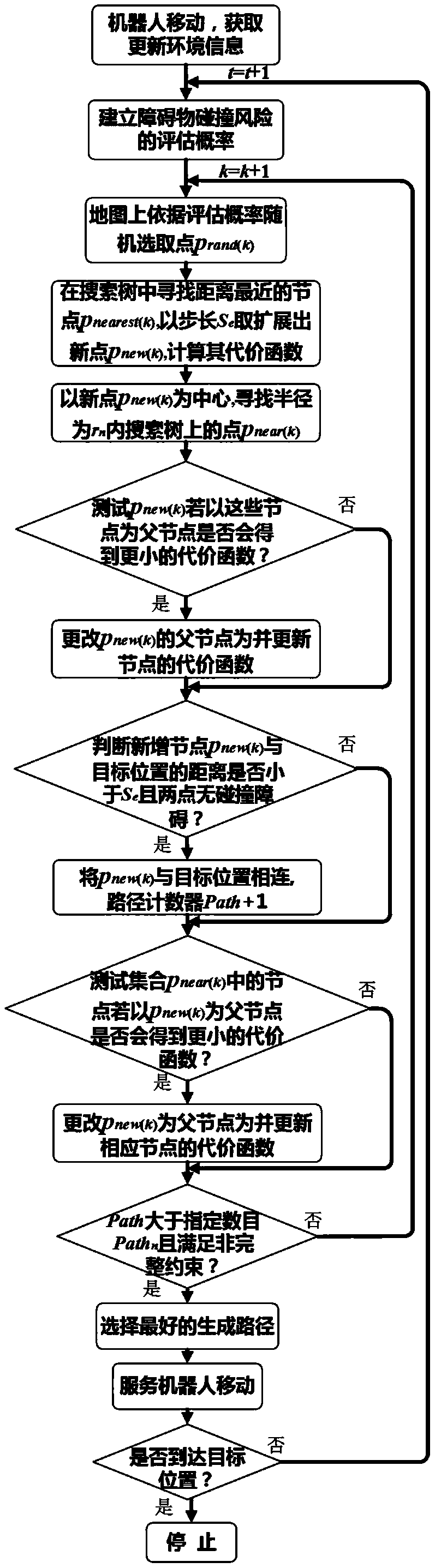
[0051] Such as figure 1 As shown, the present invention is an optimal path planning method for incremental environmental information sampling of an indoor mobile robot, including the following steps:
[0052] Step 1: Establish a probabilistic model for evaluating the collision risk of obstacles in the detected area;
[0053] Firstly, the surrounding environment information of the indoor mobile robot is obtained through the sonar sensor carried by the indoor mobile robot itself; secondly, the area passed by the indoor mobile robot is regarded as the detected area, and the obstacle collision of the detected area is established according to the surrounding environment information Risk assessment probability model, and update the assessment probability model of obstacle collision risk in the detected area in real time according to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More