

Range-finding sensor based real-time obstacle avoidance method of driveless car
A distance measuring sensor, unmanned vehicle technology, applied in the field of artificial intelligence, to achieve the effect of strong early warning, stable performance and good real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to better understand the technical solution of the present invention, further description will be made below in conjunction with the accompanying drawings.
[0051] Step (1): The point cloud information is collected by the ranging sensor carried by the unmanned vehicle or the point cloud information is collected by a binocular camera;
[0052]If a binocular camera is used for acquisition, calculation is required to obtain point cloud information. The calculation includes image correction calculation, binocular matching calculation, and triangular distance measurement calculation. Then, the obtained point cloud information is cached as a point cloud vector, and the coordinates of all point clouds All refer to the body coordinate system with the center of the unmanned vehicle as the origin, the front as the x-axis, and the left as the y-axis.
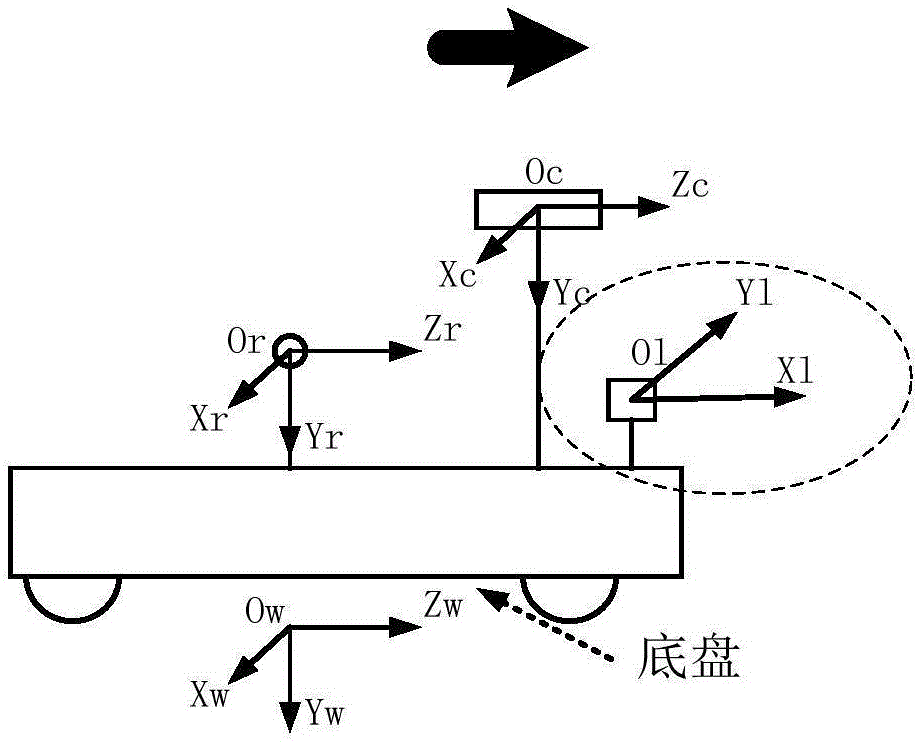
[0053] In step (1): including adopting laser radar to obtain point cloud: as figure 1 As shown, the dotted line part is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More