

Tube-arraying robot for racking platform of petroleum well drill and method
A technology of two-story platforms and drilling rigs, which is applied to drilling pipes, drilling equipment, and drill pipes, and can solve problems such as poor economy, low efficiency, and low operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In conjunction with accompanying drawing, the present invention is further described:
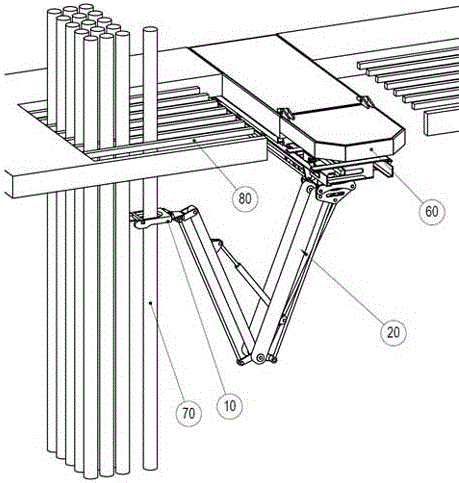
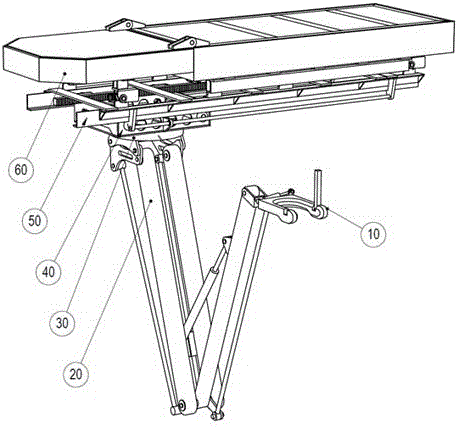
[0036] The present invention mentions a second-floor pipe-discharging robot of an oil drilling machine, such as figure 2 As shown, it includes column claw (10), telescopic arm (20), slewing mechanism (30), sliding base (40), guide rail and guide rail telescopic mechanism. The column claw (10) is hinged on one end of the telescopic arm (20), the upper end of the telescopic arm (20) is connected to the rotary mechanism (30), and the rotary mechanism (30) is arranged on the sliding base (40), and the sliding base (40) It can power walk on the telescopic guide rail (50), and the telescopic guide rail (50) is installed on the bottom of the overturned second-story platform (60).
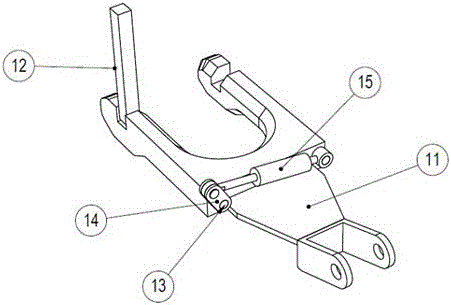
[0037] In the specific application of the present invention, the structure of the column claw (10) is as follows image 3 As shown, the above-mentioned column jaw (10) is connected with the connecting seat (11...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More