

Map merging method of unmanned aerial vehicle visual SLAM under city complex environment
A complex environment, multi-UAV technology, applied in the field of visual navigation systems, can solve the problems of occupying UAV memory, increasing the SLAM visual odometer of a single UAV, etc., to achieve compact map form, low endurance, and low endurance. The effect of reducing task execution time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0059] This design invented a map fusion method for multi-UAV visual SLAM in a complex urban environment, including the following steps:
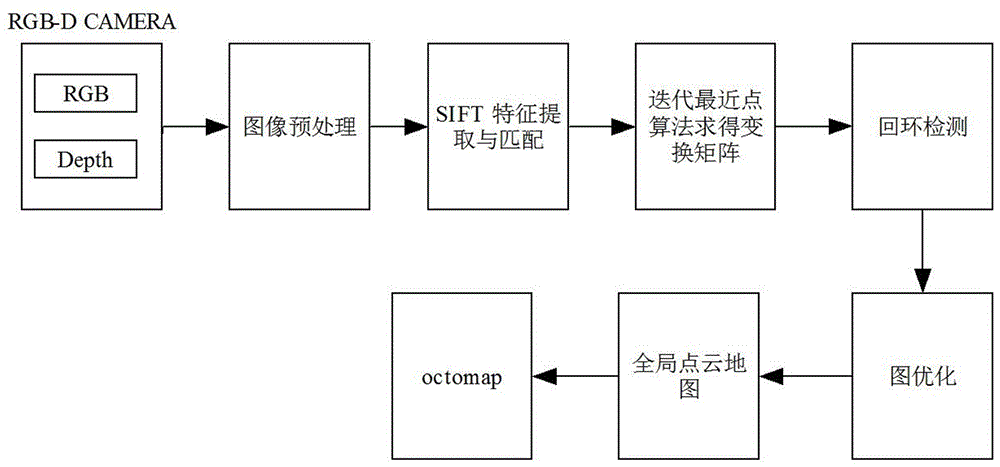
[0060] like figure 1 As shown, the RGB-D camera ZED installed in the drone is used to collect the video stream of the environment, and the RGB image and depth map of each frame of the environment are obtained; The RGB image is preprocessed, and Gaussian filtering is used to filter out noise.
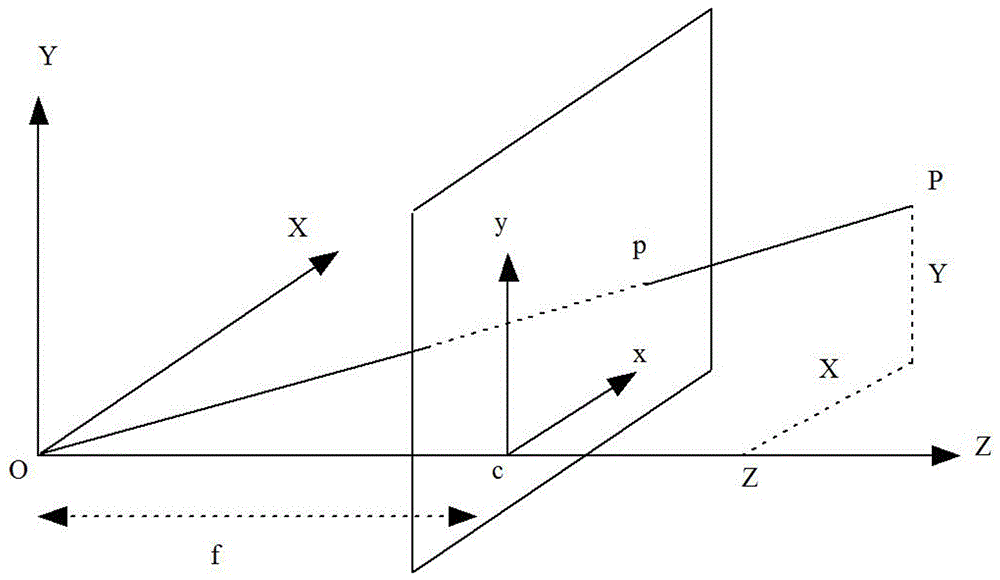
[0061] The RGB-D image is converted into a point cloud; the RGB-D camera uses a pinhole camera model, and the perspective projection relationship is as follows figure 2 shown. The correspondence between the spatial point [x, y, z] and its pixel coordinates [u, v, d] in the image is:
[0062]
[0063] where f x ,f y Respectively represent the focal length of the camera on the x and y axes, c x ,c y Refers to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More