

Vehicle GPS data map matching method based on hidden markov model
A hidden Markov and GPS data technology, applied in the field of transportation, can solve the problem of vehicle trajectory data deviation and other problems, and achieve the effect of map matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0042] This embodiment provides a vehicle GPS data map matching method based on a hidden Markov model, such as Figure 4 shown, including the following steps:
[0043] Step S1: Obtain road network data from the electronic map:
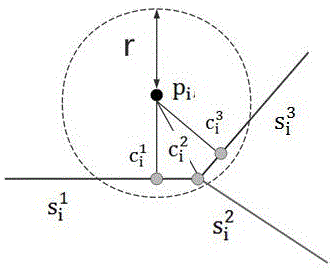
[0044] The electronic map is a vector map in shapefile format. The road network data is obtained from the map to construct a directed road network G(V,E), where V represents the intersection of roads, and E represents the road section between every two intersections. For the convenience of calculation, define the road section set S={s n |n=1,2,...,N}, s n is the nth road segment. The starting and ending point of the road segment is s n .start={x,y}, the end point is s n .end={x,y}, x,y represent longitude and latitude respectively.
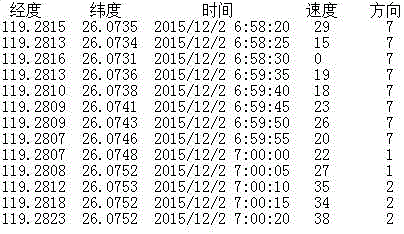
[0045] Step S2: Preprocessing the collected real vehicle trajectory data:
[0046]The co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More