

Inertial navigation system alignment accuracy evaluation method
An inertial navigation system and alignment accuracy technology, applied in the field of inertial navigation systems, can solve the problems of inability to achieve effective evaluation of azimuth misalignment angle, lack of quasi-accuracy evaluation research, and limitation of azimuth alignment performance, so as to reduce the amount of filter storage, The effect of reducing the amount of data read and enhancing the robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings.
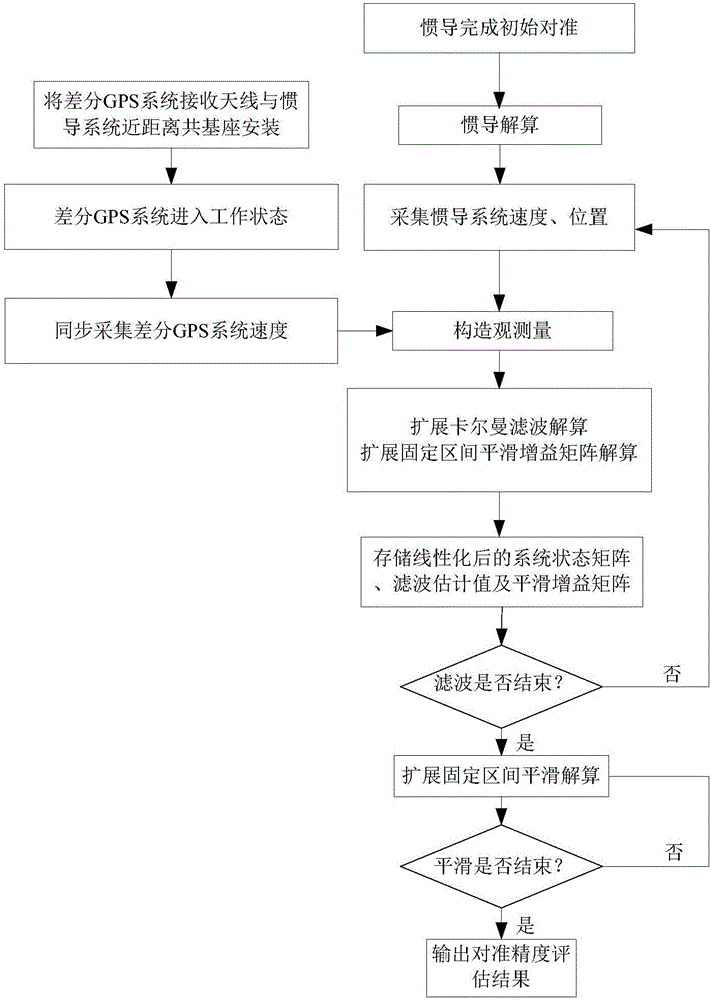
[0037] The flow chart of an inertial navigation system alignment accuracy evaluation method proposed by the present invention is attached figure 1 As shown, the main steps of the method are as follows:
[0038] Step 1: Complete the warm-up preparation for the inertial navigation system and the differential GPS system, install the differential GPS receiving antenna and the inertial navigation system on a common base at close range, complete the initial alignment of the inertial navigation system, and complete the alignment accuracy in an external computer Evaluation of initialization of filters and smoothers;
[0039] Step 2: The inertial navigation system performs navigation calculation, synchronously collecting the differential GPS output speed, and the east speed, north speed, longitude, latitude, attitude matrix calculated by the inertial navigation system, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More