

Surgical instrument for minimally invasive surgery robot
A technology of surgical robots and surgical instruments, which is applied in the fields of surgical robots, surgery, medical science, etc., and can solve the problems of scattered structure layout and large external dimensions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
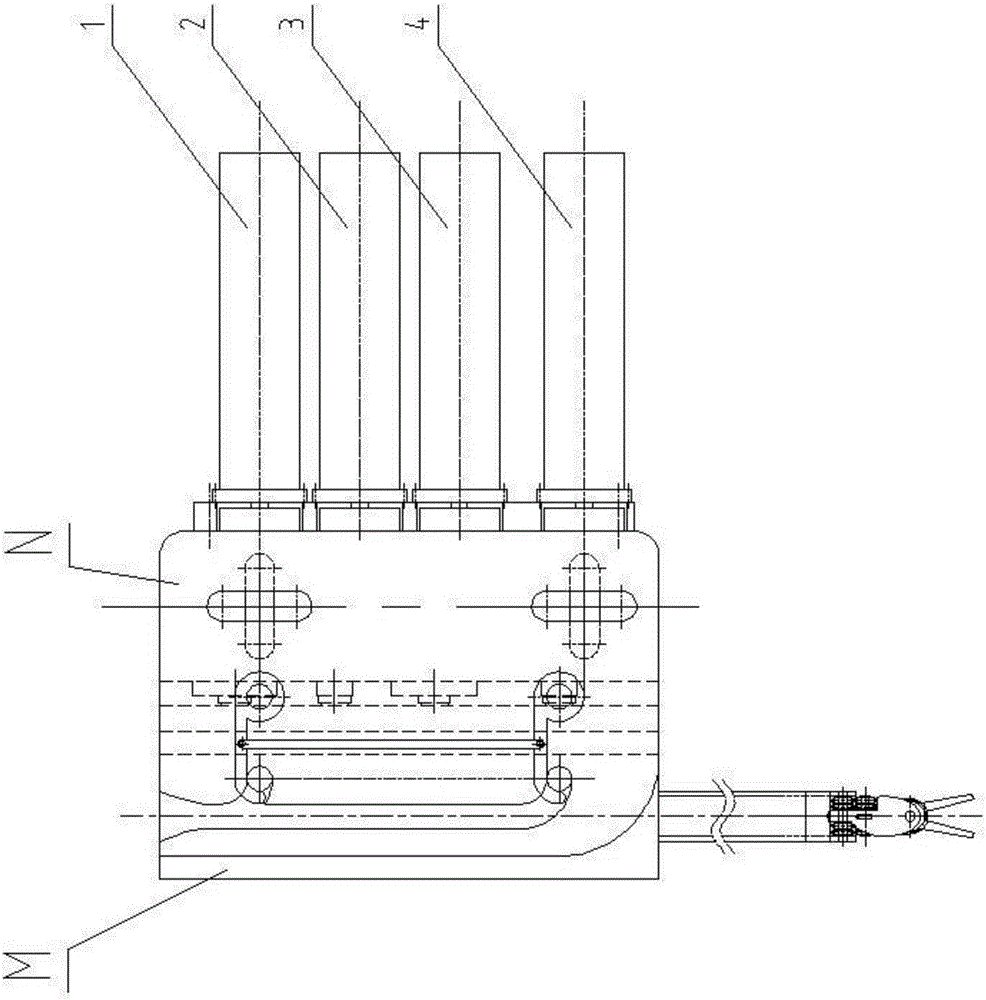
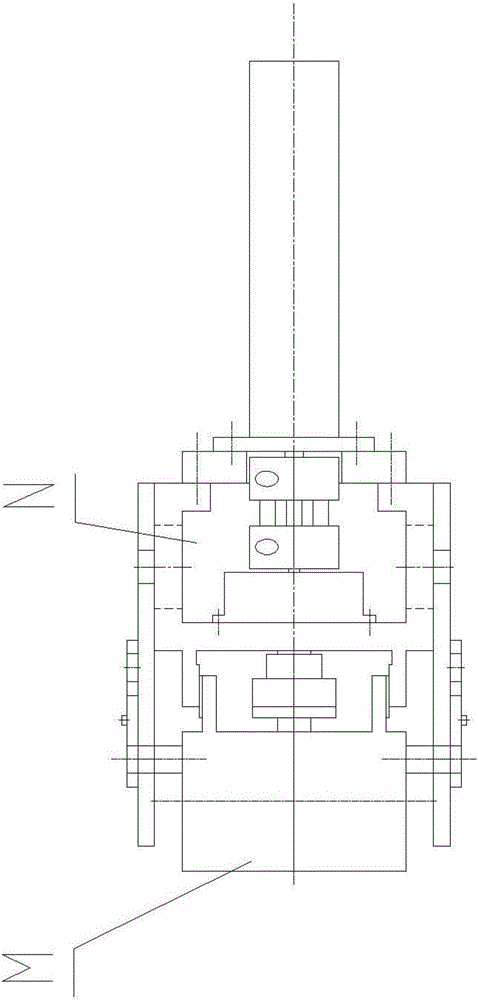
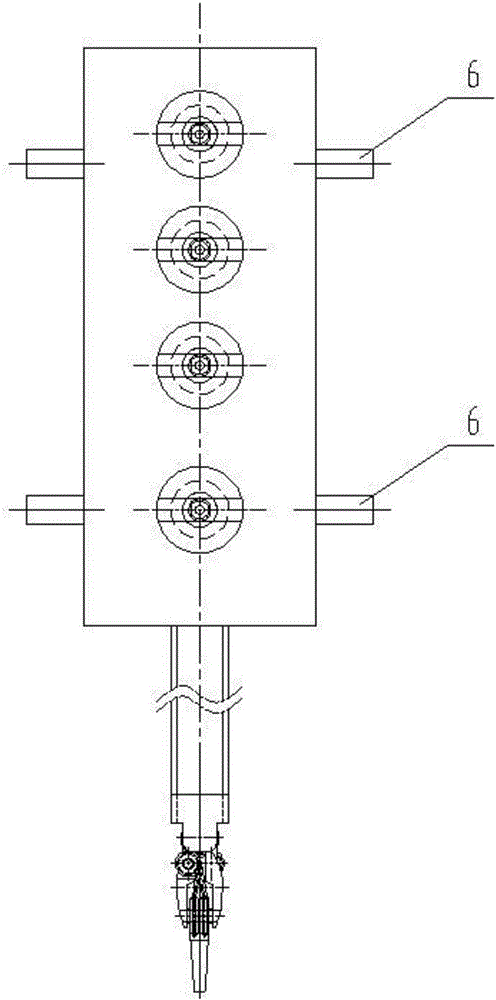
[0057] combine Figure 3 to Figure 16 To illustrate this embodiment, the surgical instrument M consists of a left finger drive mechanism 1, a wrist joint drive mechanism 2, a right finger drive mechanism 3, an operation tube drive mechanism 4, a wrist actuator 5, a tool trunnion 6, and a first guide mechanism. 7. Second guiding mechanism 8, third guiding mechanism 9, fourth guiding mechanism 10, fifth guiding mechanism 11, sixth guiding mechanism 12, seventh guiding mechanism 13, eighth guiding mechanism 14 and surgical instrument housing 15 , Surgical instrument shell two 16, surgical instrument shell three 17, surgical instrument shell four 18 and so on.
[0058] Described left finger driving mechanism 1 is made up of left finger driving wire wheel shaft 1-1, left finger wire wheel 1-2, interface clutch disc 1-3, bearing 1-4, bearing 1-5 etc. The left finger reel 1-2 is set on the left finger transmission reel shaft 1-1, and the left finger reel 1-2 and the left finger reel...
Embodiment 2
[0100] combine Figure 9 To illustrate this embodiment, on the basis of the technical solution in Example 1, the wire rope layout of the surgical instrument M can be changed to an attached Figure 9 in the structure.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More