

Cooperative follow-up operation navigation method and cooperative follow-up operation navigation device of greenhouse mobile operation platform
A mobile operation and navigation device technology, which is applied to motor vehicles, transportation and packaging, non-electric variable control, etc., can solve the problems of high reconstruction cost and complicated path laying, and achieve low cost, high operating efficiency and strong adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
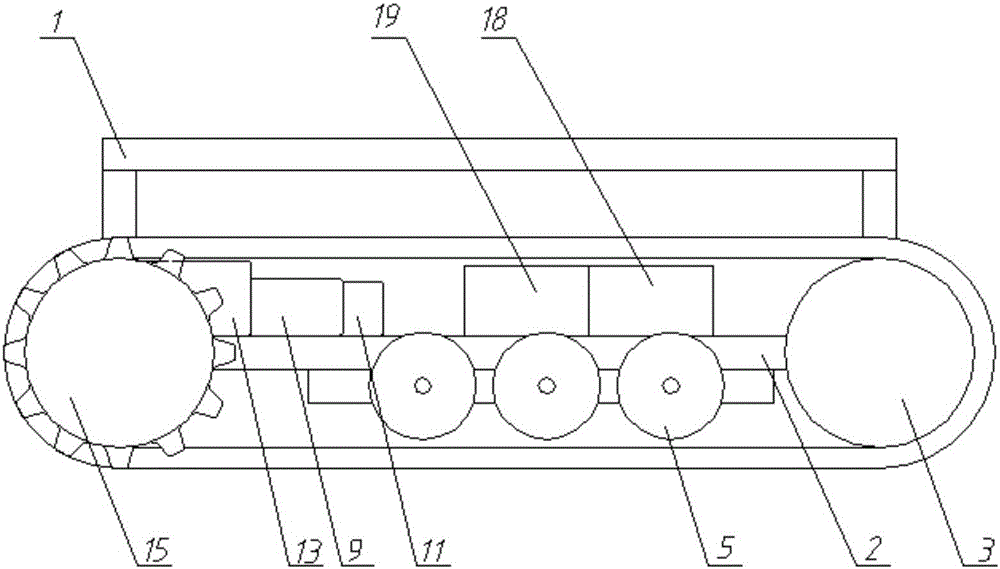
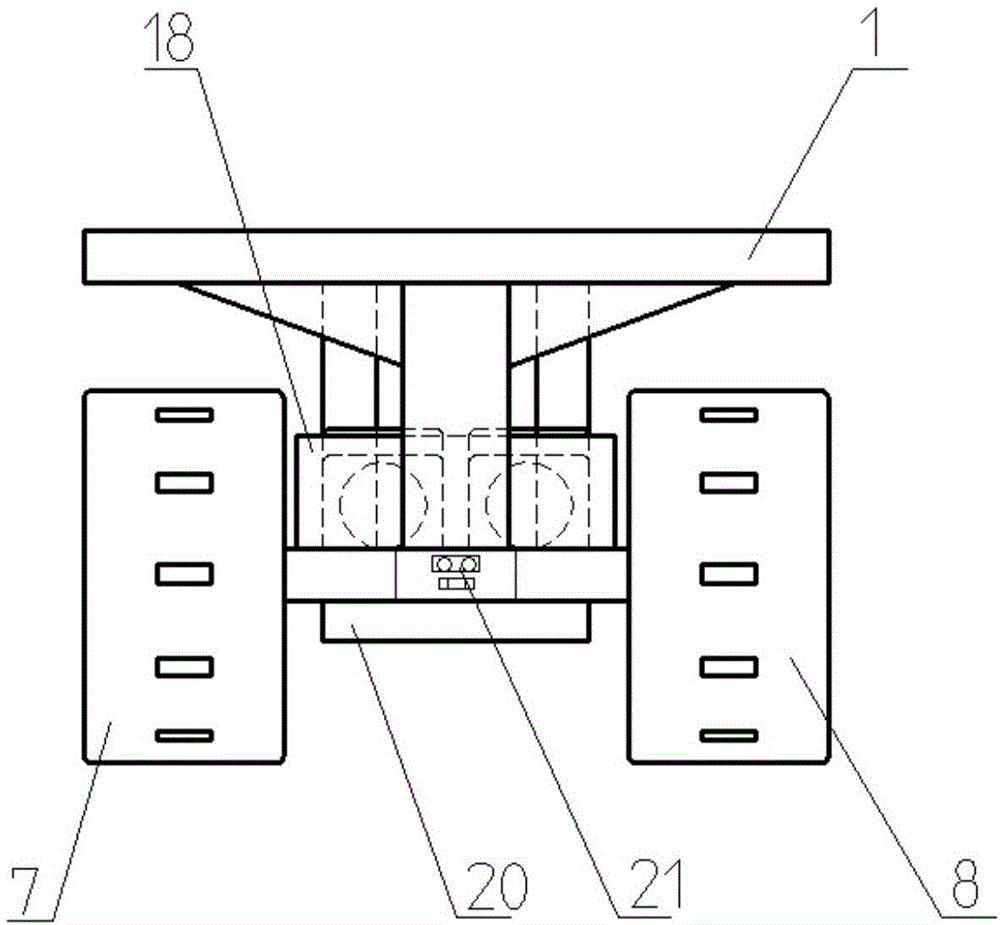
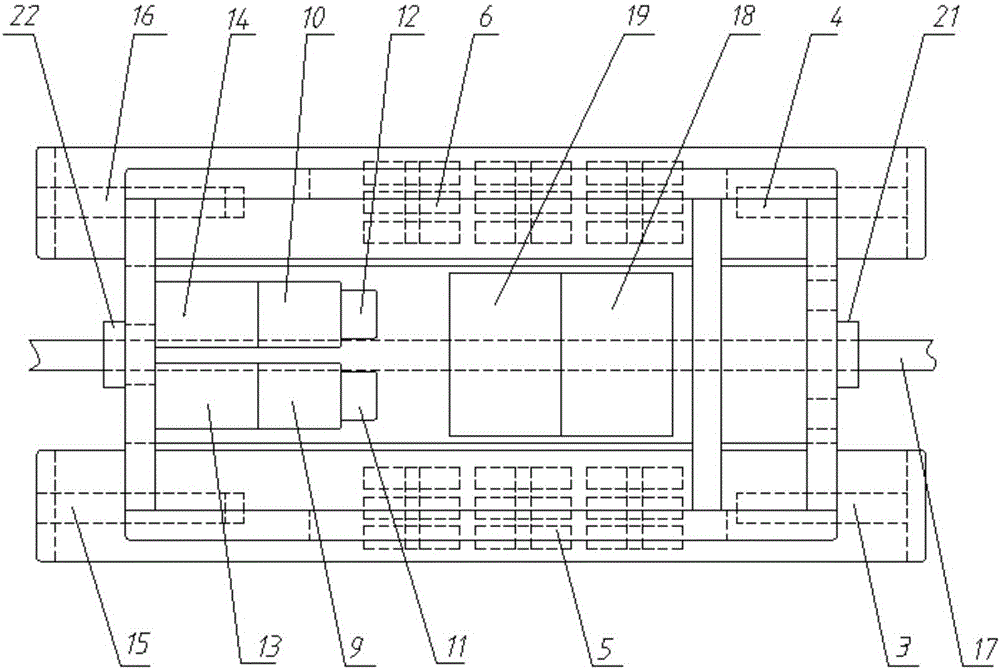
[0038] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0039] The greenhouse mobile operation platform in this embodiment includes a carrying platform, a crawler walking device and a detection control device, such as figure 1 ,Such as figure 2 ,Such as image 3 shown. The carrying platform is a frame made of steel materials, which is used to carry and transport various working tools and fruit materials. The two sides of the carrying platform are symmetrically equipped with crawler walking devices. Take the left crawler driving device as an example, the left crawler driving device includes a left servo motor, a left gear reducer, a left driving wheel, a left induction wheel, a left road wheel and a left track. The output shaft of the left servo motor is connected with the left gear reducer and fixed on the left gear reducer through bolts and nuts, the left gear reducer is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More