Bone grinding robot, and vertebral plate surgical robot control system and method
A surgical robot and robotic technology, applied in surgical navigation systems, surgical robots, surgery, etc., can solve the problems of difficulty in determining the grinding position of a bone drill, low surgical precision, and complex system, and achieve improved processing speed and control accuracy. Simplified System structure and operation process, the effect of improving accuracy and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in more detail below in conjunction with the accompanying drawings and embodiments.
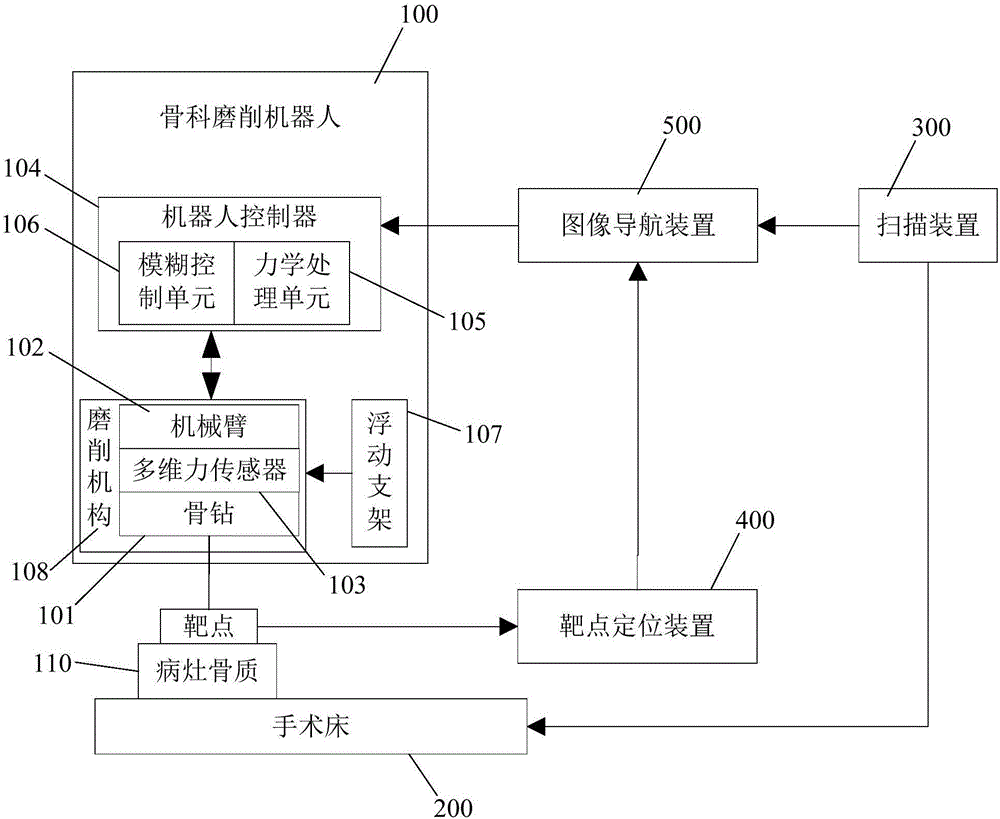
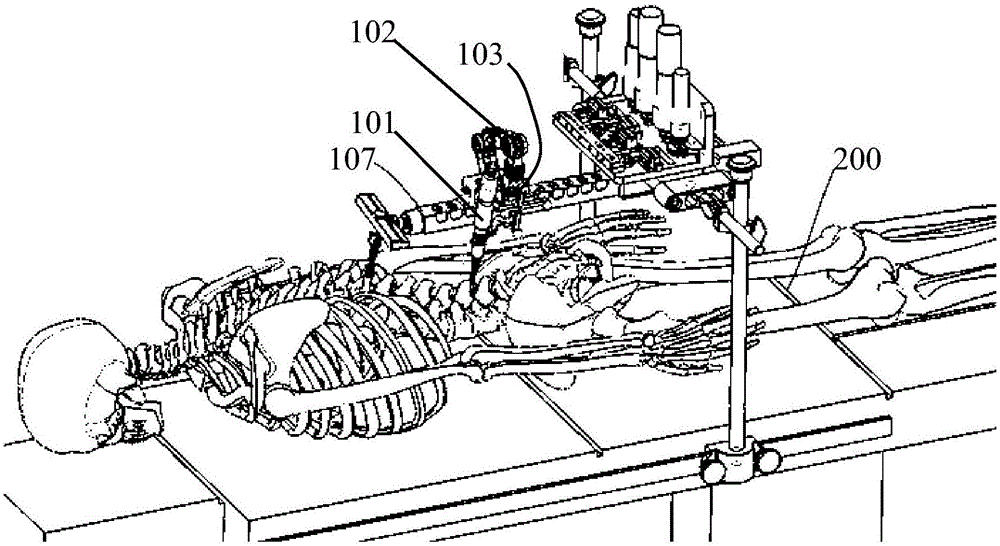
[0024] The invention discloses a bone grinding robot, which combines Figure 1 to Figure 3 As shown, it includes a bone drill 101, a mechanical arm 102, a multidimensional force sensor 103 and a robot controller 104, wherein:
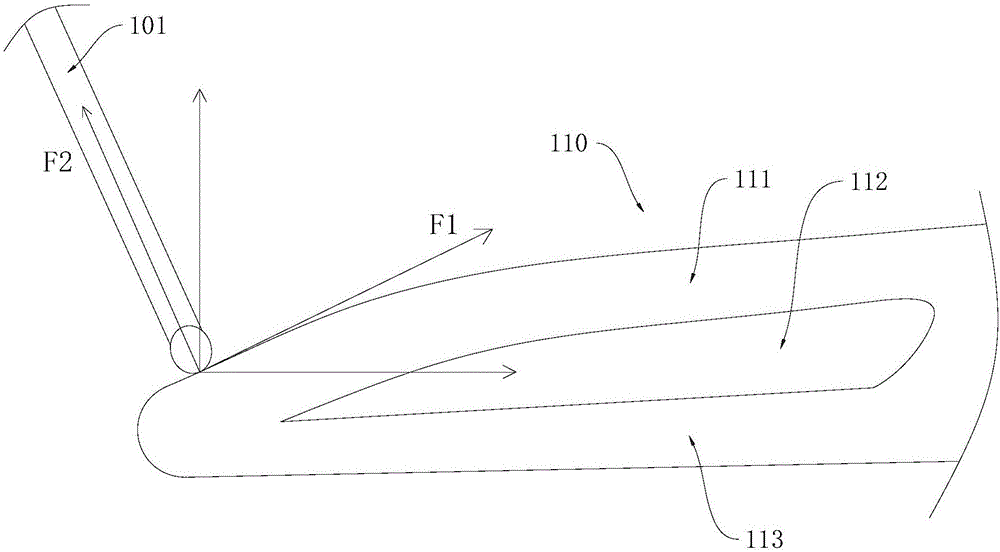
[0025] The bone drill 101 is used to grind the focus bone 110;
[0026] The bone drill 101 is arranged at the end of the mechanical arm 102, and the mechanical arm 102 is used to drive the bone drill 101 to move;
[0027] The multi-dimensional force sensor 103 is used to collect the force generated when the bone drill 101 grinds the lesion bone 110; the multi-dimensional force sensor 103 can be set on the bone drill 101, or between the bone drill 101 and the mechanical arm 102, etc. Wait.
[0028] The bone drill 101, the mechanical arm 102 and the multidimensional force sensor 103 are respectively electrically connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More