

Automatic table tennis picking robot based on TensorFlow
A table tennis and robot technology, applied in the field of robotics, can solve the problems of hardware resource waste, waste, resource waste, etc., and achieve the effect of low cost, simple structure, and high-efficiency automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further elaborated and illustrated below in conjunction with the accompanying drawings and specific embodiments. The technical features of the various implementations in the present invention can be combined accordingly on the premise that there is no conflict with each other.
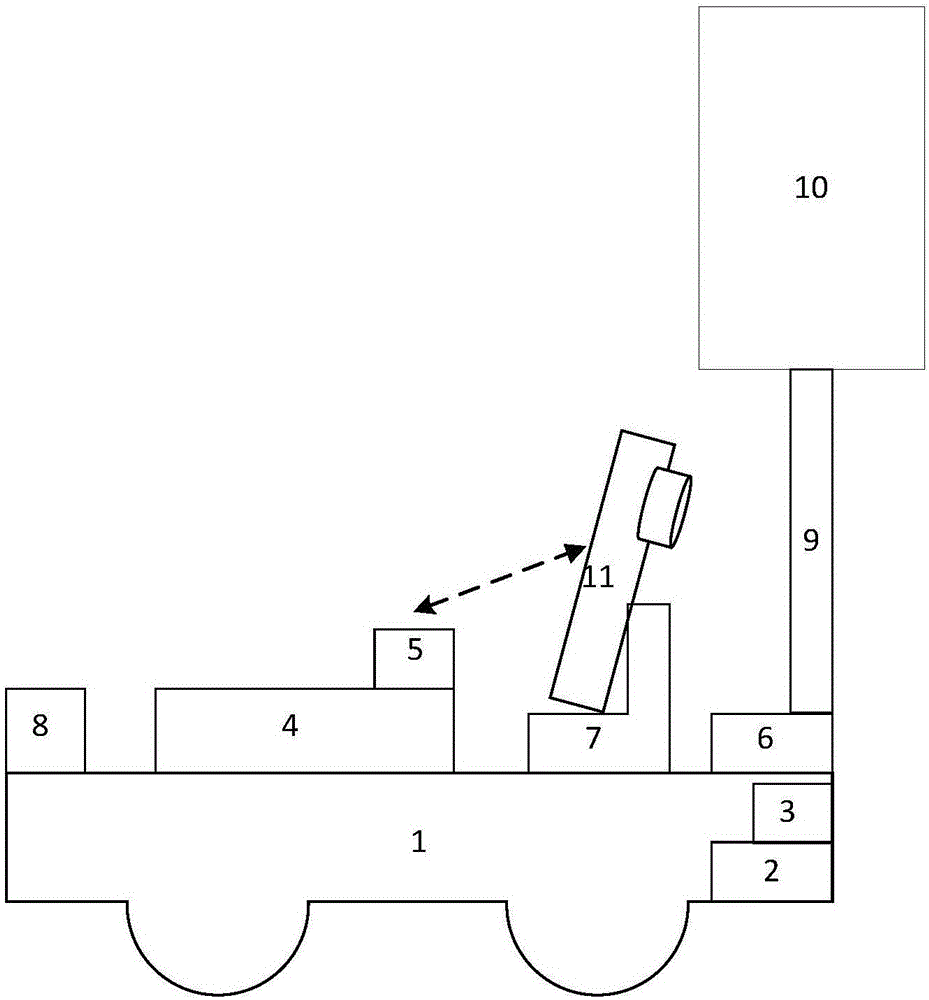
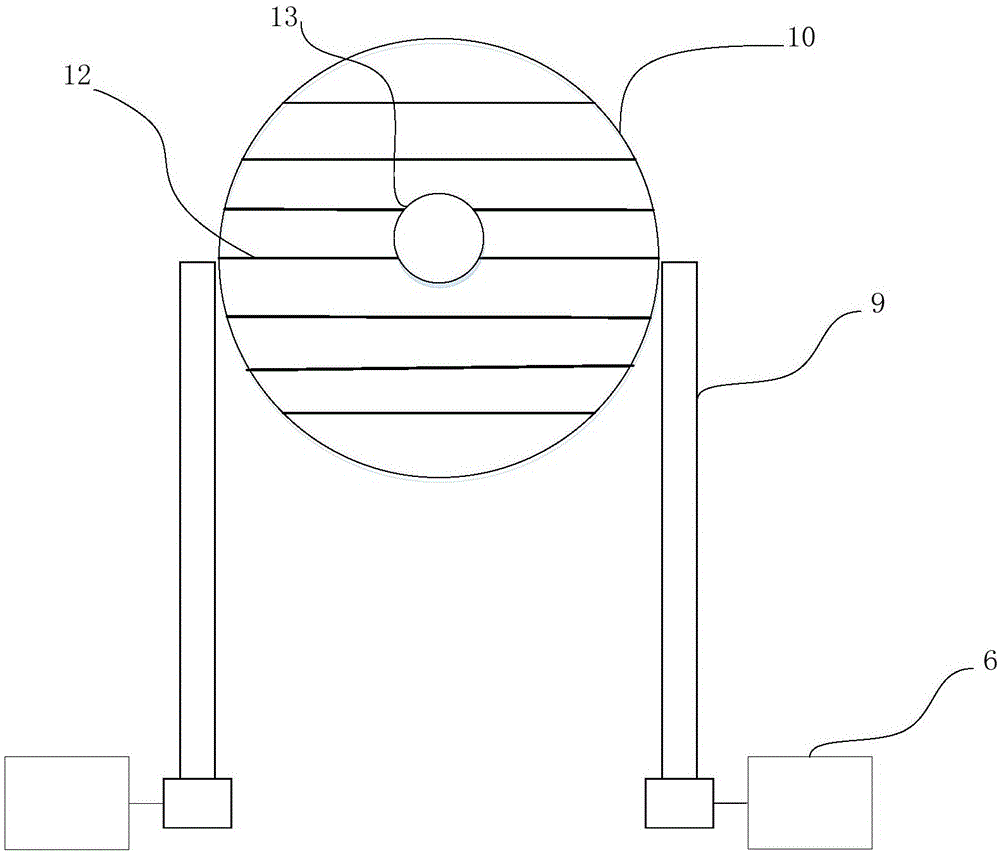
[0026] like figure 1 Shown, a kind of robot that picks up table tennis automatically, comprises vehicle body 1, single-chip microcomputer 4, steering gear 6, power supply 8, swing arm 9, ball frame 10 and elastic rope 12. The vehicle body 1 is a miniature car driven by electricity, and has a chassis and four wheels. The upper plane of the chassis can be used as a loading platform for each configuration component. Two swing arms 9 are hinged near the front end of the forward direction on the chassis. like figure 2 Shown, two swing arms 9 tops are fixed with the ball frame 10 that is used to accommodate the table tennis ball of collection. The ball frame 10 is cy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More