

Delta robot control method and system for sorting multiclass workpieces
A robot and workpiece technology, which is applied in the direction of program control manipulators, instruments, manipulators, etc., can solve problems such as inability to realize workpiece sorting, inability to meet task requirements, and large demand for robots, so as to achieve real-time performance, increase practical functions, and improve cost performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
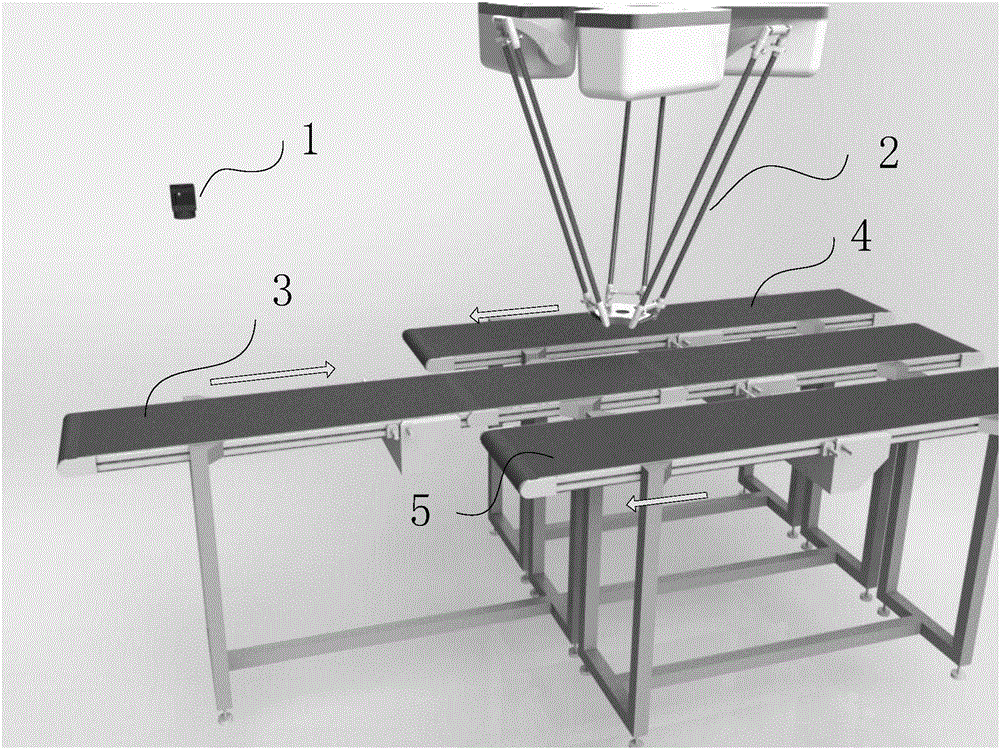
[0058] The Delta robot system for sorting multiple types of workpieces of the present invention includes a Delta robot with a grasping control system, a workpiece incoming conveyor belt for transporting workpieces to be sorted, a workpiece classification conveyor belt for transporting classified and placed workpieces, and a conveyor belt for collecting The image acquisition device of the workpiece image, the grasping control method set in the grasping control system of the Delta robot is the following Delta robot control method for sorting multiple types of workpieces; the workpiece classification conveyor belt is two or two above.
[0059] I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More