

Method for correcting errors of industrial robot offline programming on spot
An industrial robot and off-line programming technology, applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve the problems of complex calibration methods and high calibration equipment prices, and achieve the effect of simple and easy methods, precise and accurate simulation, and avoid inaccuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0042] Such as Figure 1 to Figure 4 As shown, the present invention corrects the method for the error of off-line programming of industrial robots in the field as follows:
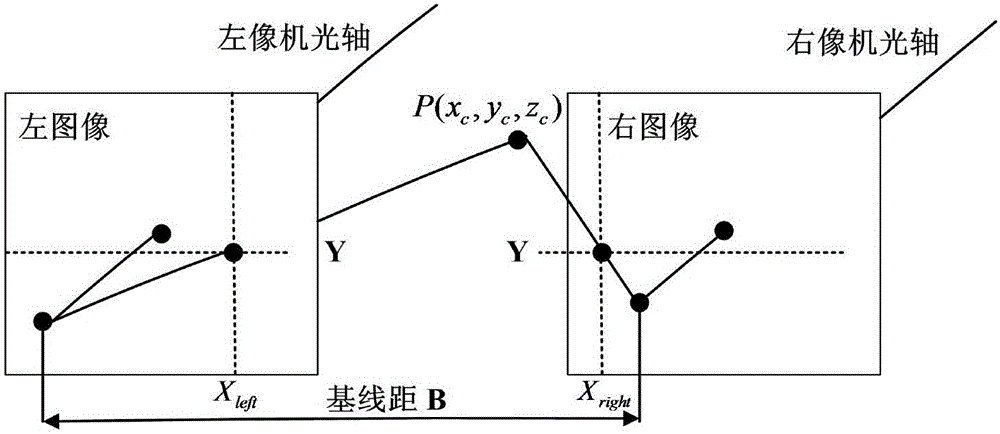
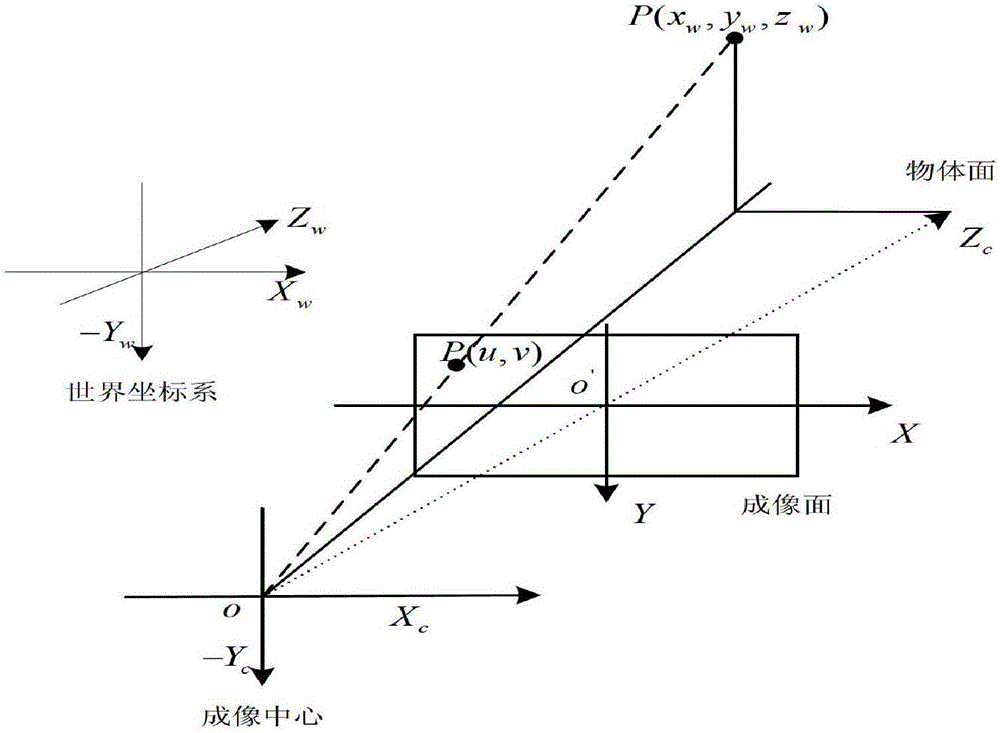
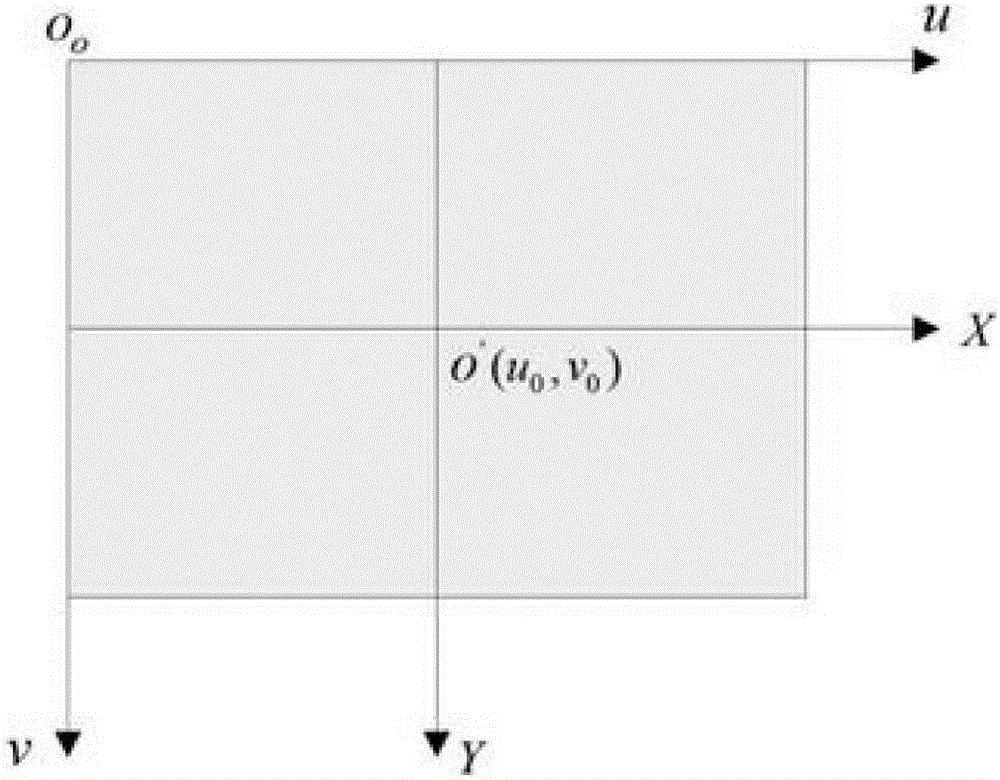
[0043] First of all, the on-site layout is carried out in the off-line programming simulation of industrial robots, and the industrial robots are placed. Then select two points in the entire layout to place industrial cameras, and these two points need to be special, convenient, and easy to place. angle). Then, establish a new coordinate system based on these two industrial cameras: take the position of one of the industrial cameras as the origin of the coordinate system, the direction of the line connecting with the other industrial camera is the positive direction of the X axis, and the direction of the optical axis of the industrial camera is Y The positive direction of the axis, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More