Four-foot robot walking mechanism comprising linear joints
A quadruped robot and walking mechanism technology, applied in the field of robotics, can solve problems such as energy consumption, achieve the effects of enhanced stability and integrity, extended use time, and less energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
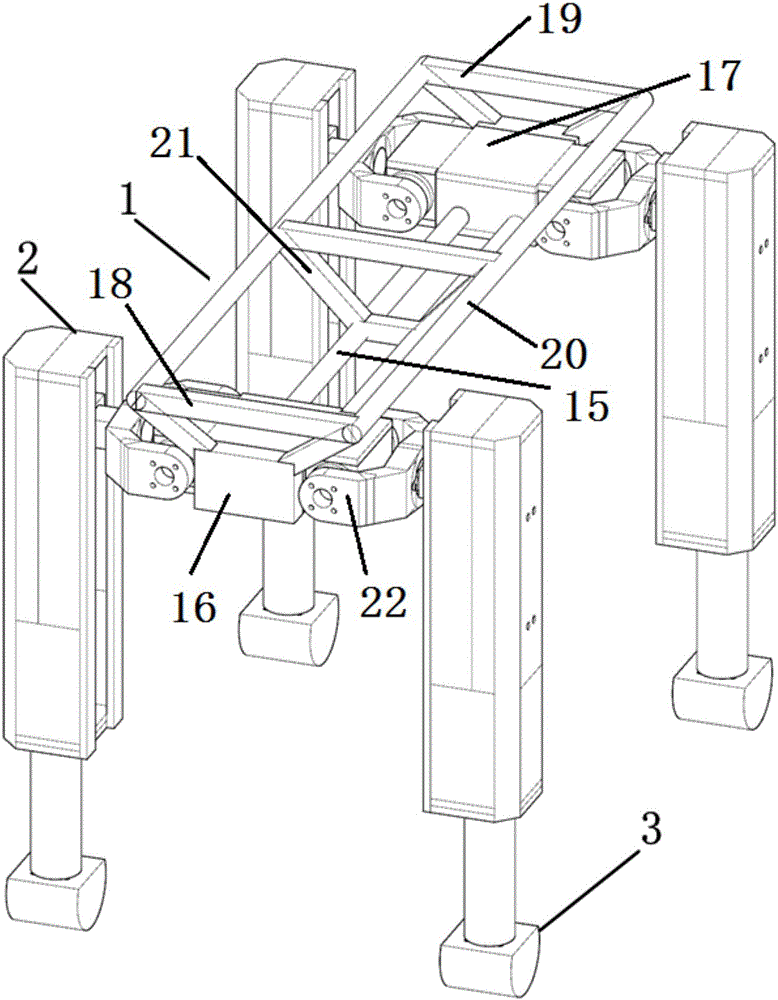
[0028] Such as Figure 1-Figure 2 As shown, a walking mechanism of a quadruped walking robot includes a robot torso 1 , a leg mechanism 2 and a foot mechanism 3 .
[0029] The torso part 1 of the robot is used to connect the four leg mechanisms 2 of the robot, and is also equipped with a control system and a power system of the robot. Also can place heavy object on the platform of robot torso part 1 when needing load, realize the transportation function of quadruped robot.
[0030] The robot trunk part 1 comprises a first connection block 16 and a second connection block 17 connected by a first connecting rod 15, the first connection block 16 both sides are fixed with the hip joints 22 of the first pair of leg mechanisms 2, and the second connection Both sides of the block 17 are fixed with the hip joints 22 of the second pair of leg mechanisms 2 . A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com