Five-leg biomimetic robot mechanism
A technology of bionic robots and steering gears, which is applied in the fields of motor vehicles, transportation and packaging, etc. It can solve the problems of general stability of quadruped robots, not particularly flexible leg movements, and few degrees of freedom of robots, so as to achieve convenient and fast movement steering, The effect of low processing and maintenance costs and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
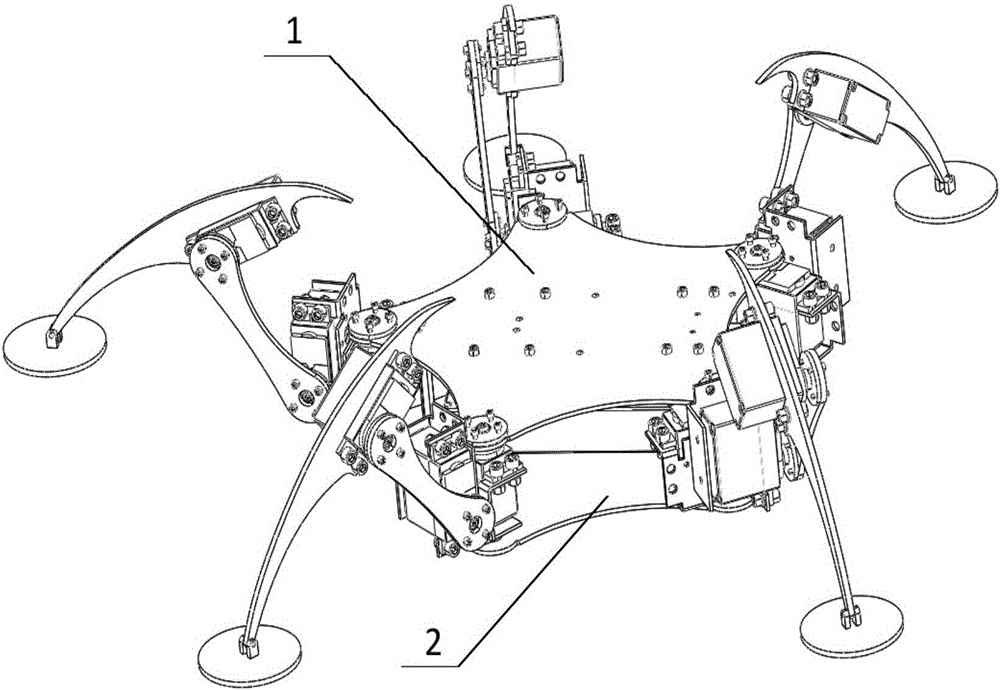
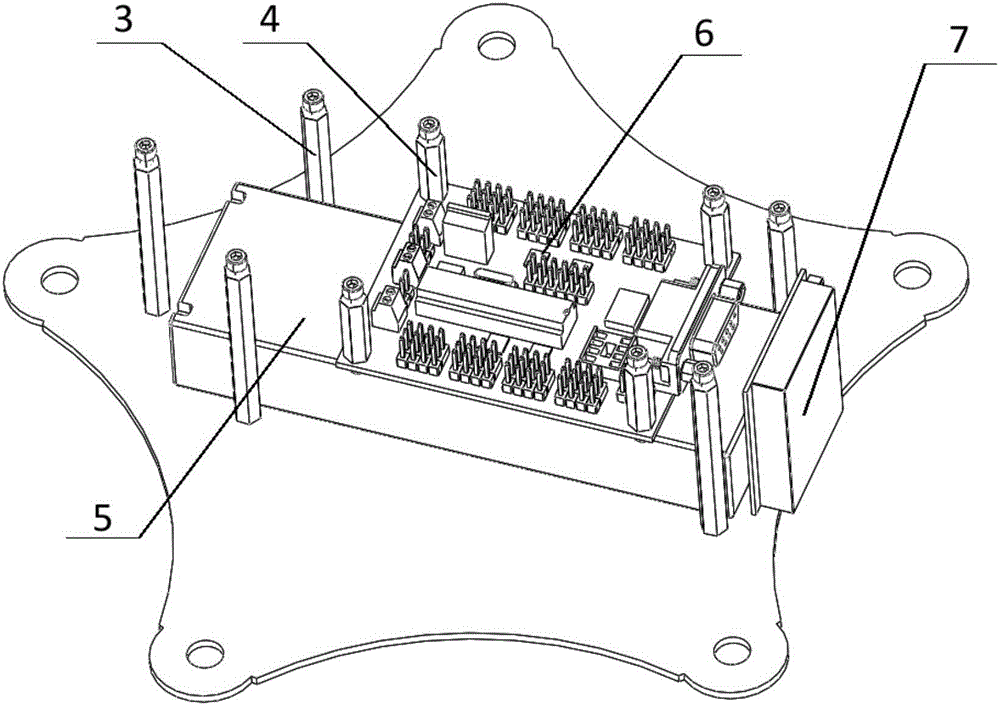
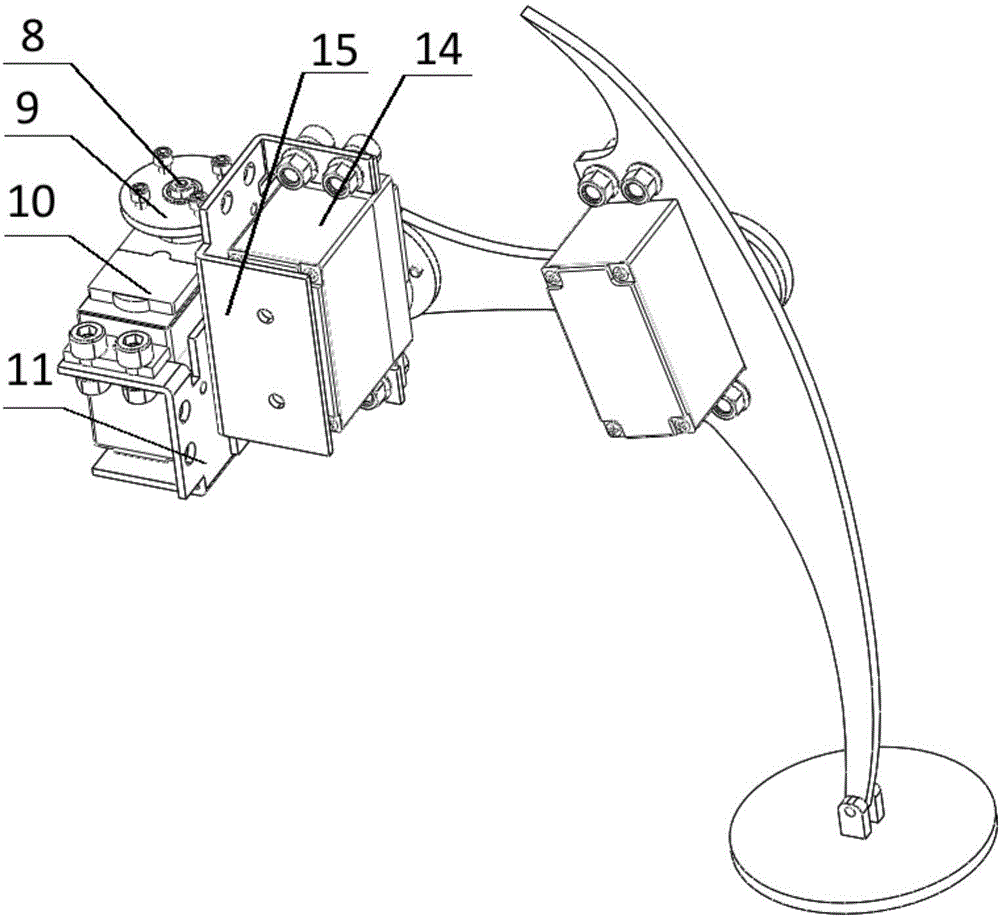
[0020] combine Figure 1-Figure 5 , the present invention relates to a five-legged bionic robot mechanism, comprising a torso, mechanical legs, and a control device; the torso includes a first support plate 1, a second support plate 2, and a first support rod 3; the control device includes a second Support rod 4, driver 5, control circuit board 6, system power supply 7; the mechanical leg includes a first shaft end baffle 8, a first connection plate 9, a first digital steering gear 10, a first support frame 11, a second Shaft end baffle 12, second connection plate 13, second digital steering gear 14, second support frame 15, first swing lever 16, third shaft end baffle 17, third connection plate 18, third digital steering gear 19, the second swing rod 20, the support plate 21, the support sleeve 22;
[0021] The first support plate 1 and the second support plate 2 are respectively located at the upper and lower ends of the center of the robot mechanism, distributed symmetrica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com