Robot positioning method fusing RGBD depth sensor and encoder
A depth sensor, robot positioning technology, applied in the direction of instruments, surveying and mapping and navigation, measuring devices, etc., can solve the problems of poor positioning accuracy or robustness, achieve high-precision positioning, easy to popularize and apply, high positioning accuracy and robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
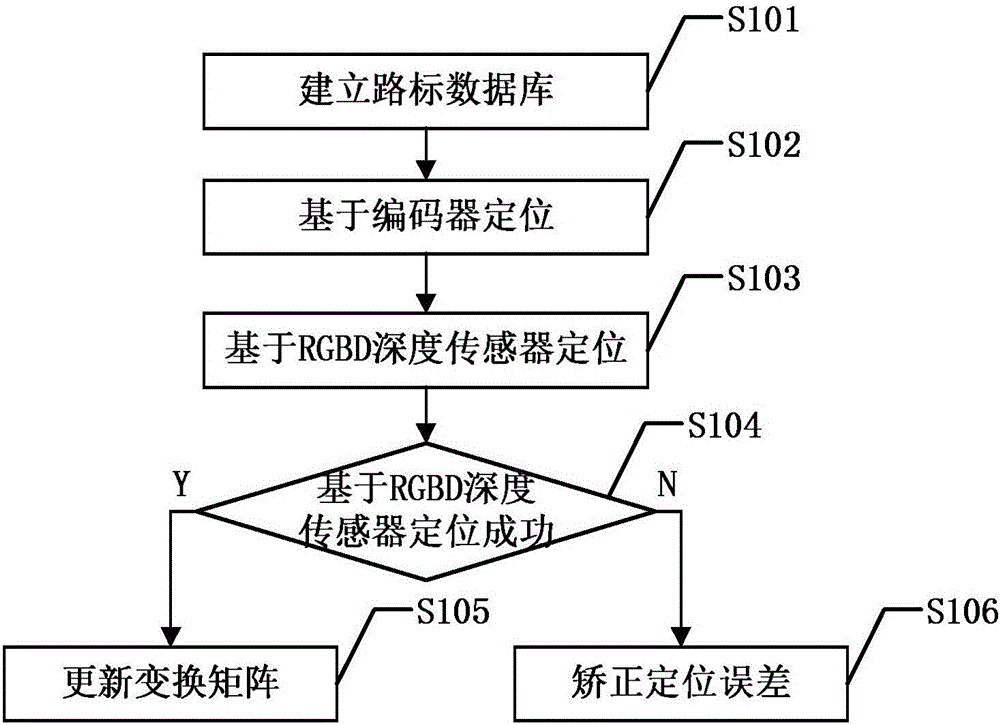
[0025] figure 1 It is a flow chart of a specific embodiment of the robot positioning method that integrates RGBD depth sensors and encoders in the present invention. Such as figure 1 As shown, the specific steps of the robot positioning method of the fusion of RGBD depth sensor and encoder in the present invention include:
[0026] S101: Establish a landmark database:
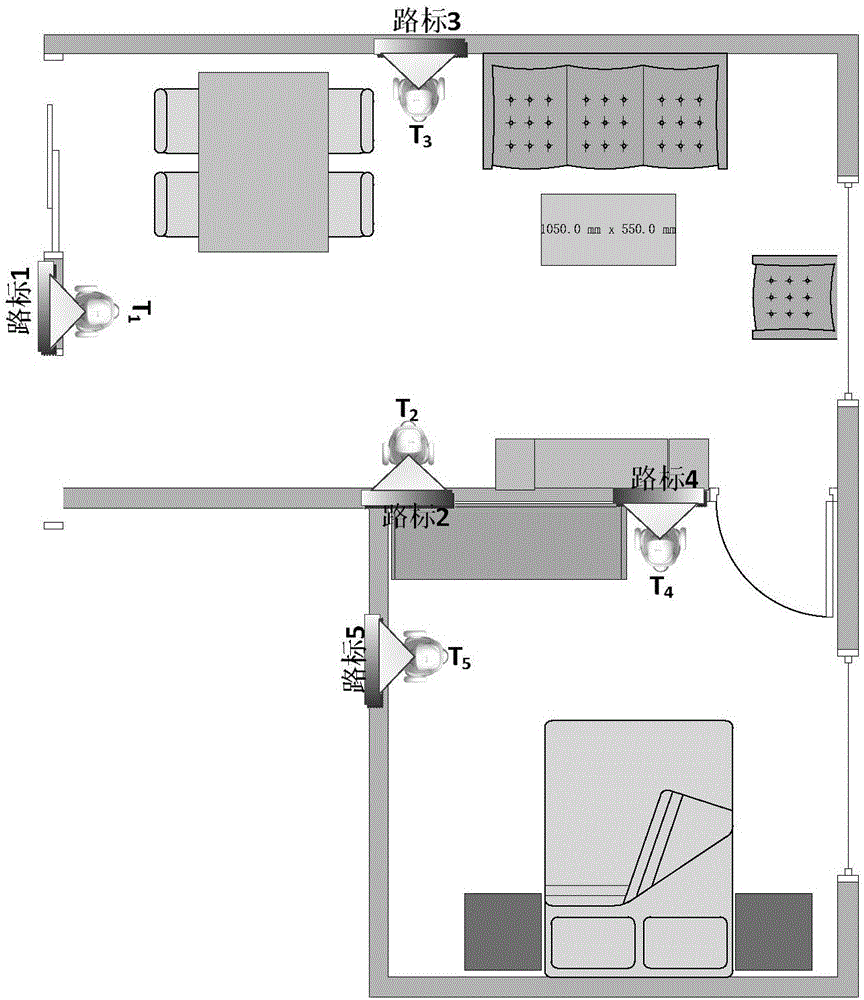
[0027] In the robot movement area, determine the starting position of the robot, use the starting position as the origin to establish a world coordinate system, and then select or configure road signs at the starting point and key positions. Collect images of road signs when moving near them, and record the corresponding position coordinates T m , m=1, 2, . The landmark database is used to provide reference for robot vision positioning.
[0028] In order to make the information in the landmark database more reliable and effective, it is best to select the location of the landmark according to the following...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com