

Obstacle detection method based on information fusing of laser radar and CCD camera
A laser radar and obstacle detection technology, applied in the direction of measuring devices, optical devices, electromagnetic wave re-radiation, etc., can solve the problem that the sensor is difficult to meet the environmental adaptability and detection accuracy at the same time, to meet the environmental adaptability and overcome the error. big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
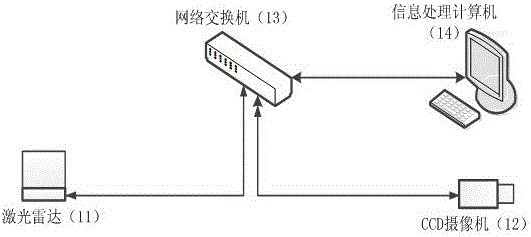
[0015] The present invention will be described in detail below in conjunction with the accompanying drawings. figure 1 Is the hardware frame diagram of the present invention, such as figure 1 As shown, the laser radar and CCD camera obstacle detection device involved in the method is composed of a laser radar 11 , a CCD camera 12 , a network switch 13 and an information processing computer 14 . The point cloud data collected by the laser radar 11 and the image data collected by the CCD camera 12 are transmitted to the information fusion computer 14 through the network switch 13, and the information fusion computer 14 transforms the obtained point cloud data and image data into the same coordinate system, and 32 The distance information of the laser radar 11 is fused with the color and texture information of the CCD camera 12 to finally obtain the position coordinates and external dimension information of the obstacle.
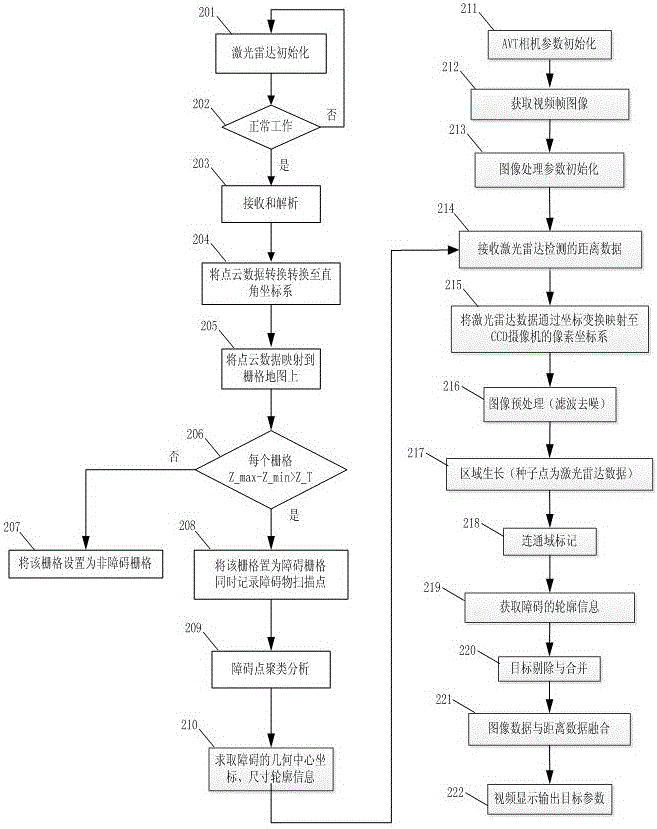
[0016] figure 2 It is a program flowchart of the pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More