

Automatic high-precision indoor rapid positioning method
A positioning method and high-precision technology, applied in two-dimensional position/channel control and other directions, can solve problems such as low cost and low response time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
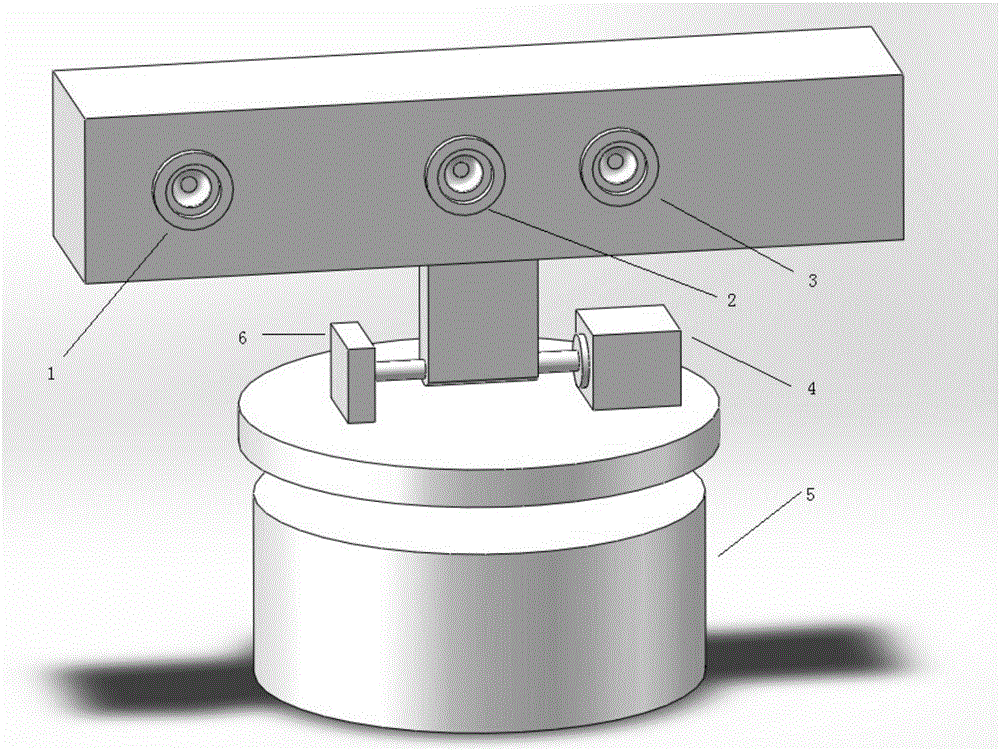
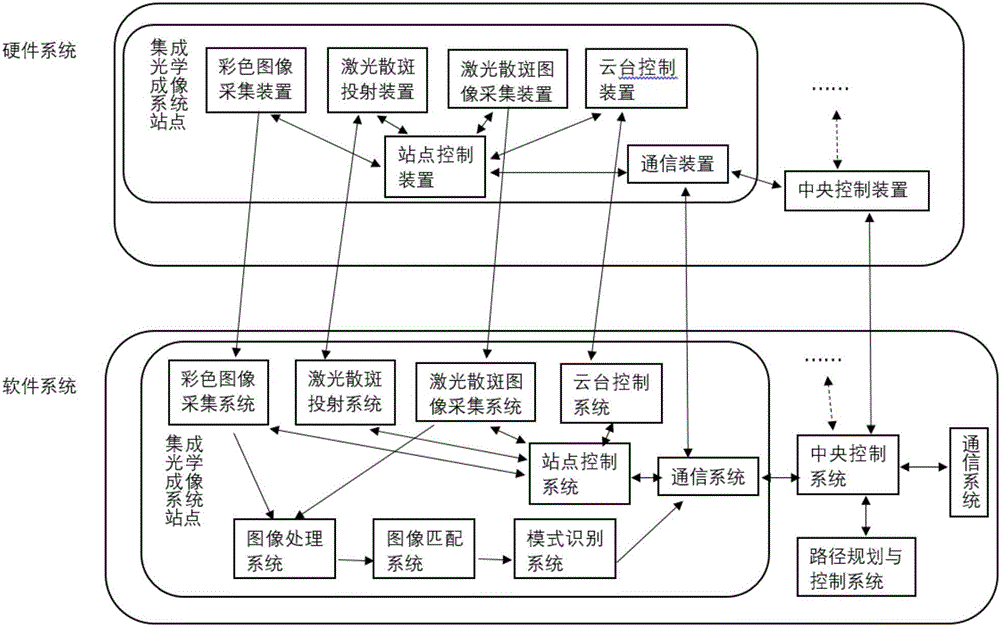
[0129] see Figure 1-Figure 4 , Automatic indoor positioning system, including: 7. Integrated optical imaging system site device; 10. Built-in central control system device. The built-in central control system device 10 is connected to multiple integrated optical imaging system site devices 7 .
[0130] The site device 7 of the integrated optical imaging system includes: 1. color camera; 2. infrared projector; 3 infrared camera; 4 pitch pan / tilt servo motor; 5. horizontal pan / tilt servo motor; A power module, a communication module, and a processing module in the system site device 7, the power module is connected to the communication module and the processing module.
[0131] The specific working steps of the site device of the integrated optical imaging system are as follows:
[0132] Automatic calibration of a single integrated optical imaging system site, including: parameter calibration of the color camera, calibration of the laser speckle collected by the infrared came...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More