

Three-phase unit characteristic point matching method, measuring method and three dimensional detection device
A feature point matching and feature point technology, which is applied in the field of optical and electronic measurement, can solve the problems of increasing application cost, many cameras, and affecting measurement accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0089] This embodiment relates to a method for matching feature points of a three-phase unit.
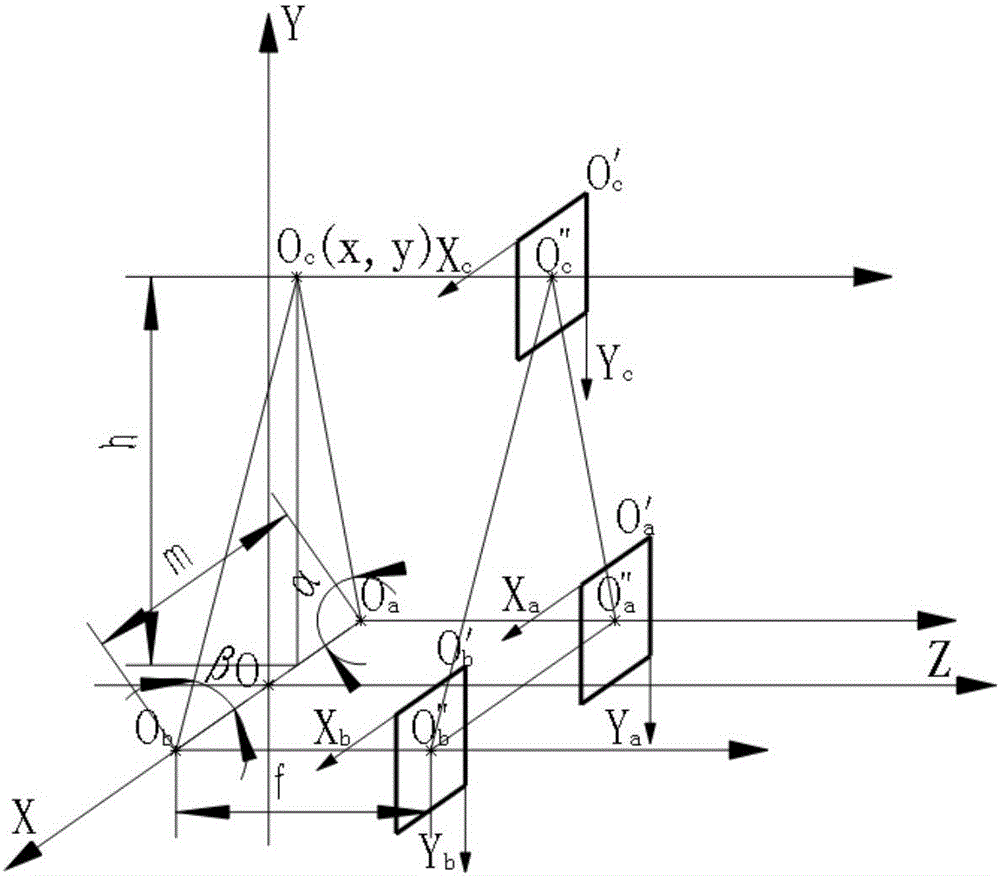
[0090] 1. Establish a three-dimensional measurement system and a three-dimensional coordinate system for the front image model of the plane three-camera unit.
[0091] In order to facilitate the description of the feature point matching method and measurement method of the planar three-camera group in the embodiment of the present invention, it is necessary to establish a planar three-camera group three-dimensional measurement system that meets the requirements and the three-dimensional coordinate system corresponding to the planar three-camera group three-dimensional measurement system. It is more convenient to apply the method of the embodiment of the present invention, use the forward projection model, and adopt the three-dimensional measurement system of the plane three-phase unit and the corresponding three-dimensional coordinate system established in the following manner:
[0...
Embodiment 2
[0154] This embodiment relates to a three-camera planar array feature point measurement method.
[0155] Include the following steps:
[0156] b1. After the image acquisition is completed, use the method adopted in embodiment 1 to find out the unique matching point group corresponding to all the feature points in the base image plane;
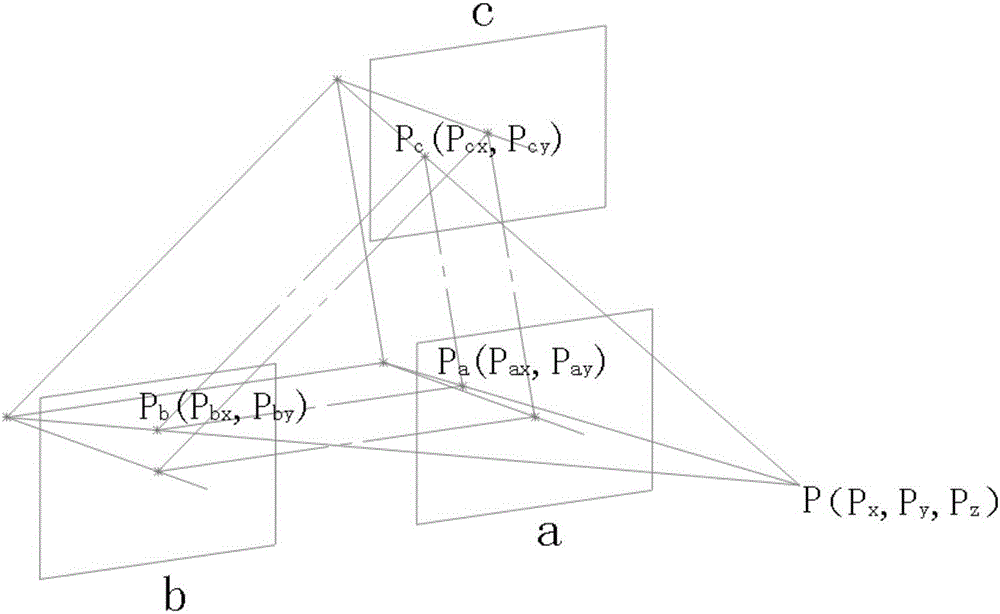
[0157] b2. According to the image coordinates of the unique matching point group obtained in step b1, calculate the spatial position coordinates of the viewpoint;
[0158] b3. According to the spatial position coordinates of the viewpoint obtained in step b2, form 3D point cloud data, establish a 3D point cloud graphic, and reproduce a 3D stereoscopic image.
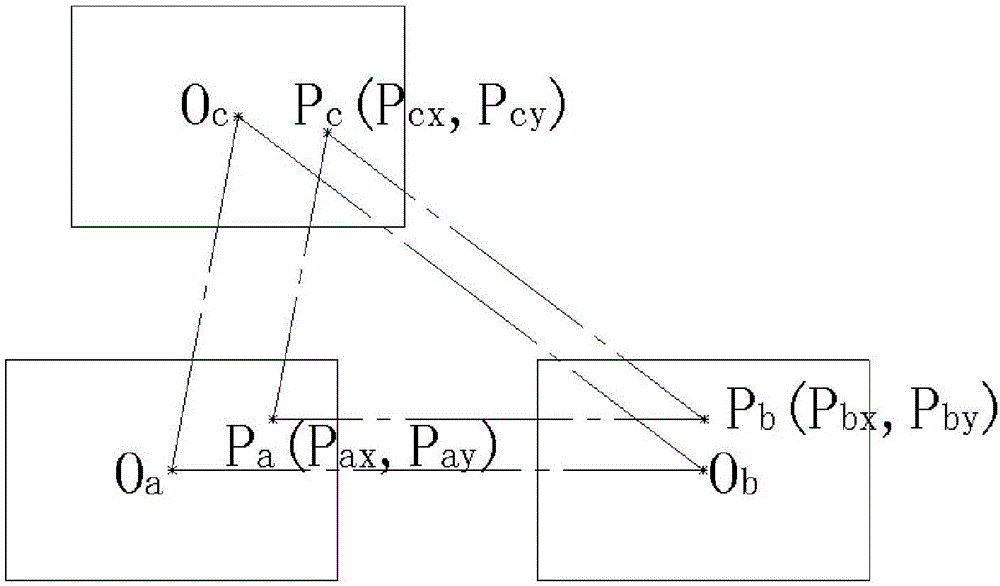
[0159] Step b1 includes:
[0160] b11. Take one image plane in the horizontal image plane of a group of three-camera group as the base image plane, and for a feature point on the base image plane, find out the adjacent base image plane in the lateral direction according to the matching ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More