

Nonlinear model predictive control-based trust region-SQP method for gait optimization of biped robot
A biped robot and nonlinear model technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not being able to achieve efficient and stable human-like walking gait, destroying the dynamic and stable walking of robots, It is impossible for robots to realize periodic motion and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
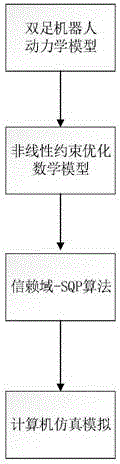
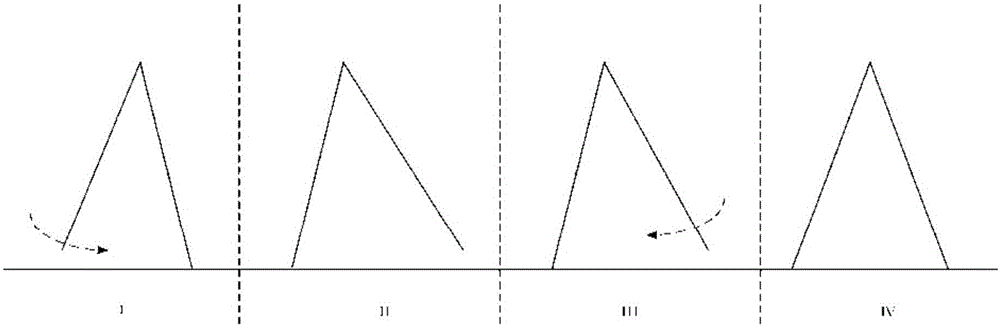
[0117] 1. See figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 and Figure 9 , the present embodiment provides a trust region-SQP method for gait optimization of a biped robot based on nonlinear model predictive control, and the specific steps are described as follows:
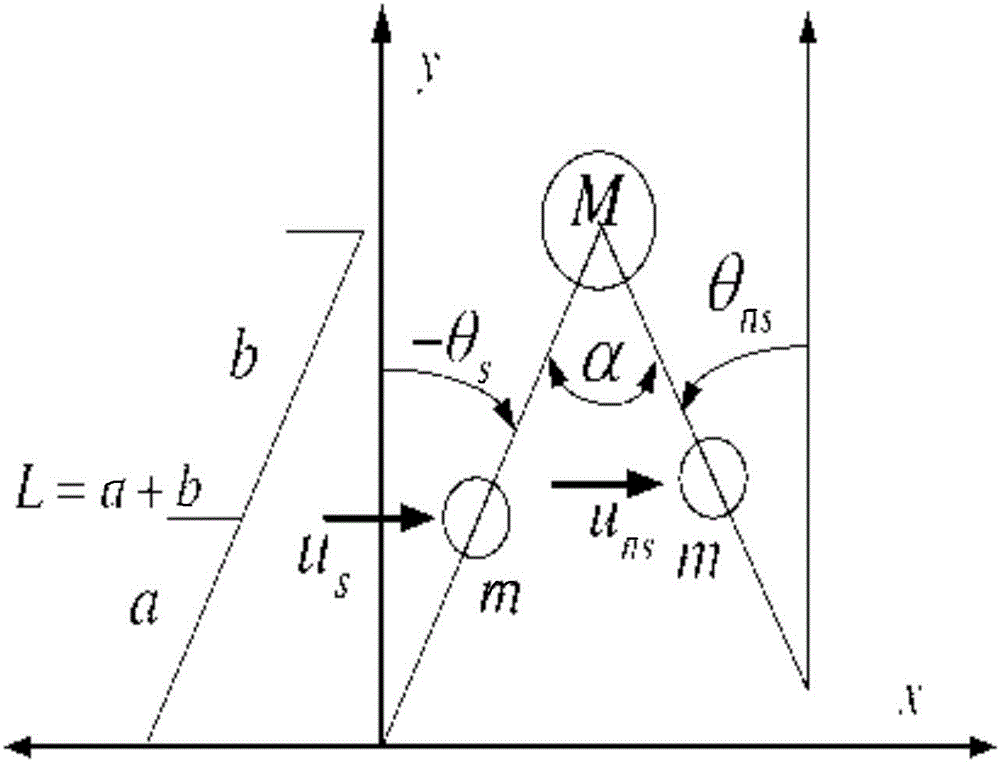
[0118] 1) Establish a dynamics mathematical model of a Compass-like biped robot:
[0119] Lagrangian Mathematical Model of Compass-Like Biped Robot in Swing Phase
[0120]
[0121] Among them, q=(θ ns (t), θ s (t)), θ ns (t) and θ s (t) represent the angular displacement of the swing leg and the support leg in the vertical direction, respectively, represents the angular velocity of the swing leg and the support leg, represents the kinetic energy of the system, and V(q) represents the potential energy of the system. Simultaneously take the derivative of (1)
[0122]
[0123] Therefore, the kinetic equation for the swing phase is
[0124]
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More