

A self-adaptive buoyancy micro-calibration distribution system for deep sea underwater robots
A technology of underwater robot and distribution system, which is applied in the directions of underwater operation equipment, ships, and ship safety, can solve the problems of long time consumption, reduced economic benefits, low work efficiency, etc., and achieves reduction in volume and mechanical structure. Simple, energy-saving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
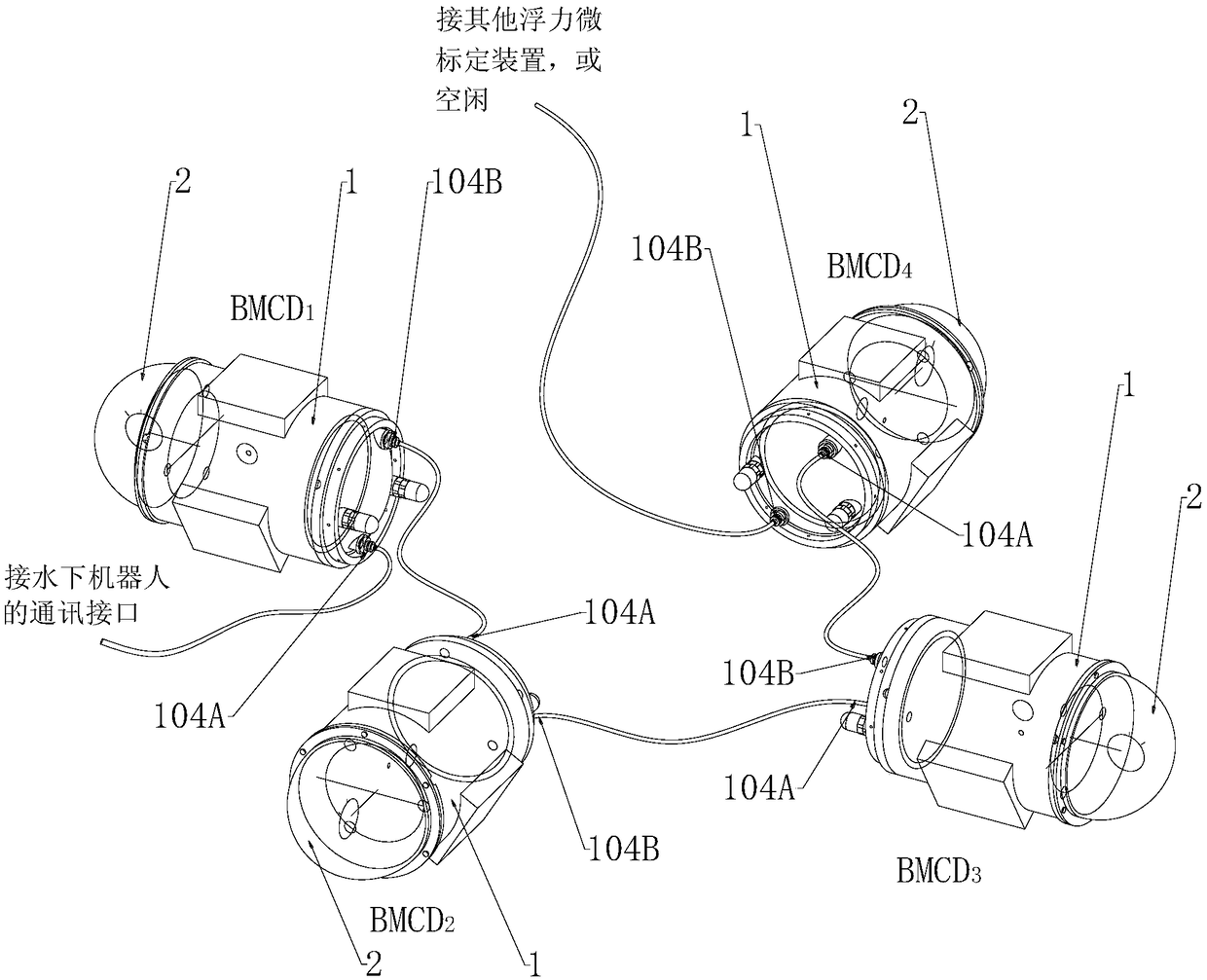
[0048] An adaptive buoyancy micro-calibration distribution system for deep sea underwater robots, which consists of multiple adaptive buoyancy micro-calibration devices (BMCDs for short), named BMCDs respectively 1 、BMCD 2 ...BMCD n . Each adaptive configurable buoyancy micro-calibration mechanism (BMCD) can be configured as a master control terminal (Host) or a controlled terminal (BusSlave). For any one of the above adaptive buoyancy micro-calibration devices (BMCD) or BMCDx (x=1, 2, . . . , n), the hardware components are the same.
[0049] figure 1 The self-adaptive buoyancy micro-calibration distribution system for deep-sea underwater robots is composed of 4 MBCDs.
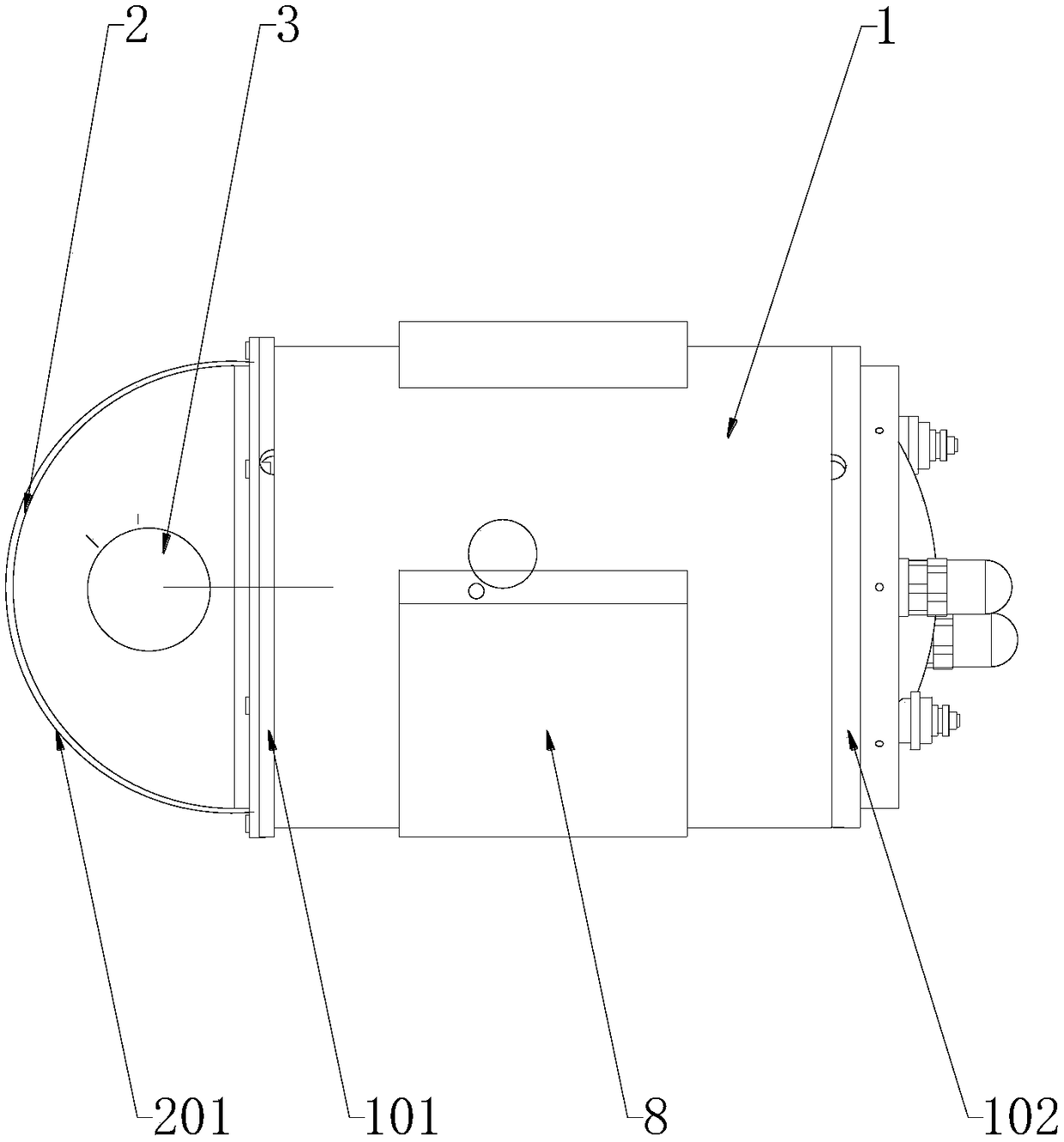
[0050] A single BMCD is composed of a silo 1, an elastic balloon 2, a balloon expansion and contraction mechanism 3, a power drive mechanism 4, a telescopic link 5, and a control module 6.
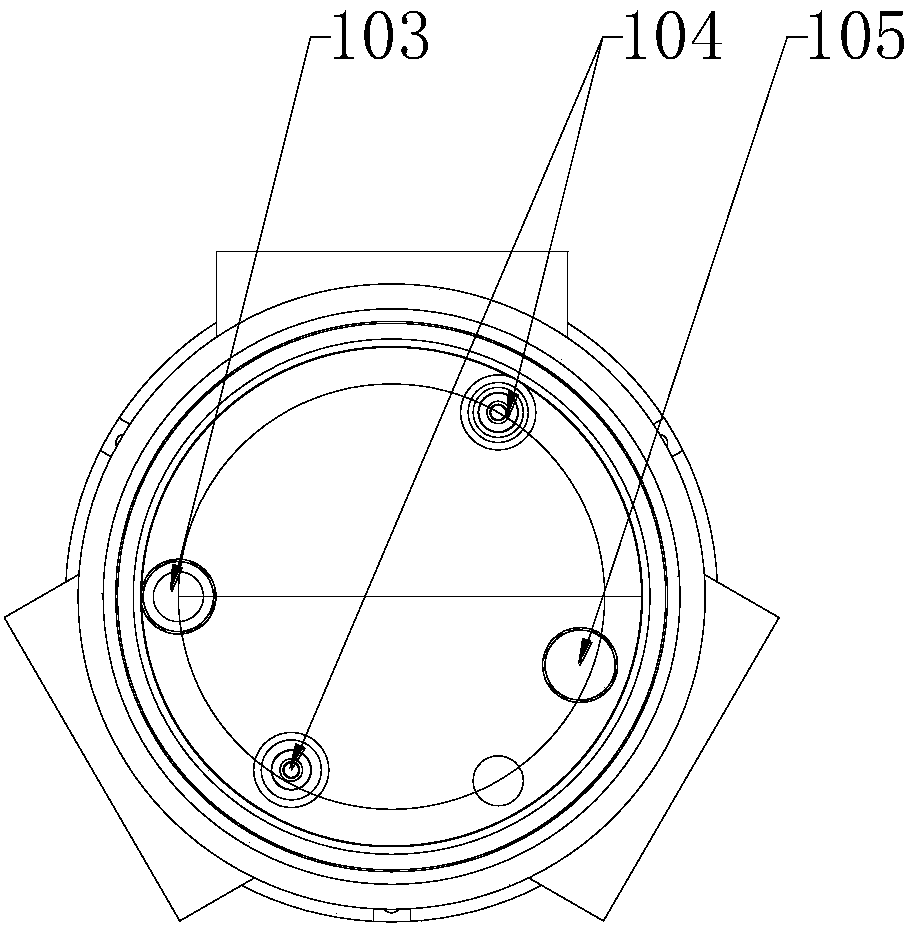
[0051] exist figure 2 Among them, the silo 1 is a hollow cylinder, and the front end cover 101 and the rear end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More