

Six-rotor flying robot used for detecting underground utility tunnel
A flying robot and integrated pipe gallery technology, applied in unmanned aerial vehicles, rotorcraft, aircraft and other directions, can solve the problems of time-consuming and laborious, the aircraft's obstacle avoidance and navigation effect is poor, and the detection parameters are few, so as to overcome the time-consuming and labor-intensive problems. , to achieve the effect of autonomous navigation and obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the purpose, technical solution and advantages of the present invention more clear, the present invention will be further described below in conjunction with the accompanying drawings.
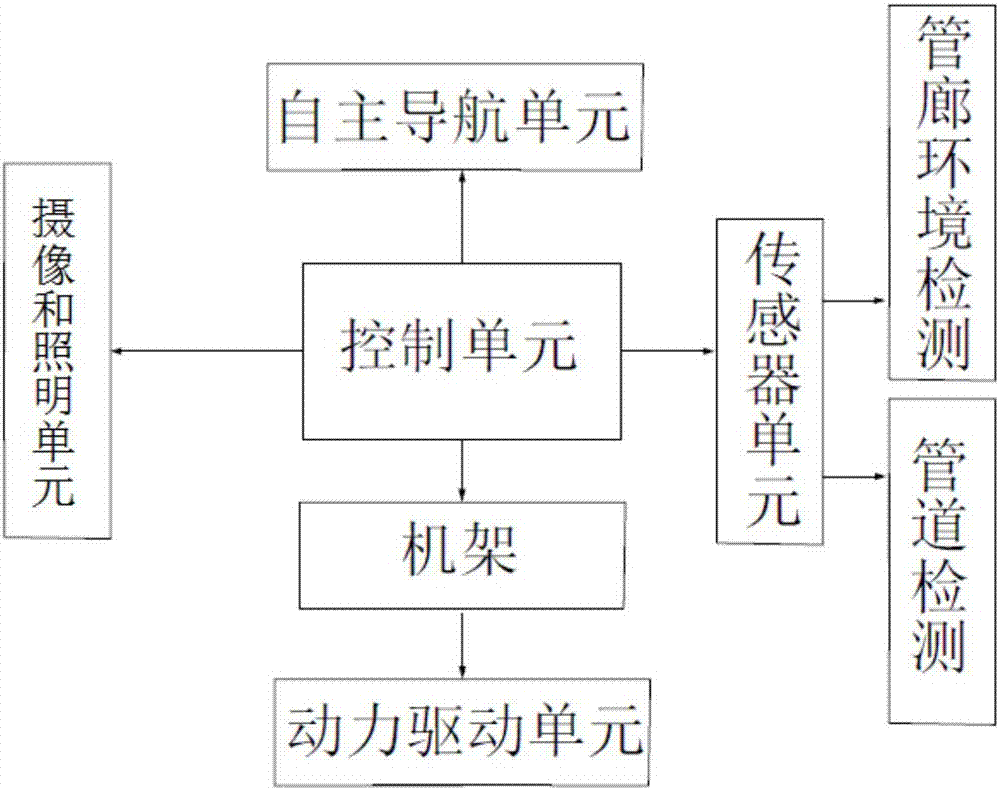
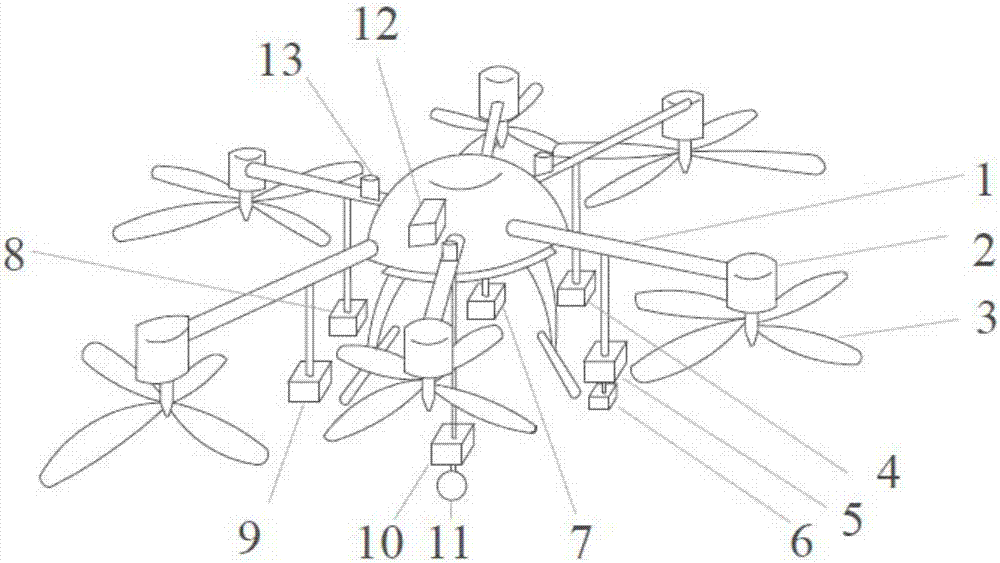
[0031] like figure 1 and figure 2 As shown, the present invention discloses a six-rotor flying robot for the detection of underground comprehensive pipe gallery, including a frame, a power drive unit, a sensor unit, an autonomous navigation unit, a camera and lighting unit, a control unit and a storage unit;
[0032] The frame includes six arms;
[0033] The power drive unit includes six groups of flying mechanisms, which are respectively arranged on the endpoints of the six arms of the frame;
[0034] The flight mechanism includes an electric motor and a corresponding rotor, wherein the electric motor is fixedly connected to the corresponding arm of the flight mechanism, the rotating shaft of the rotor is fixedly connected to the output end of the electric motor, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More