Method for calibrating installation error of optoelectronic pod of unmanned aerial vehicle
An installation error, photoelectric pod technology, applied in the aviation field, can solve the problems of cumbersome implementation of installation error calibration and low efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention provides a method for calibrating the installation error of the photoelectric pod of an unmanned aerial vehicle. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail with reference to the accompanying drawings and examples. It should be pointed out that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
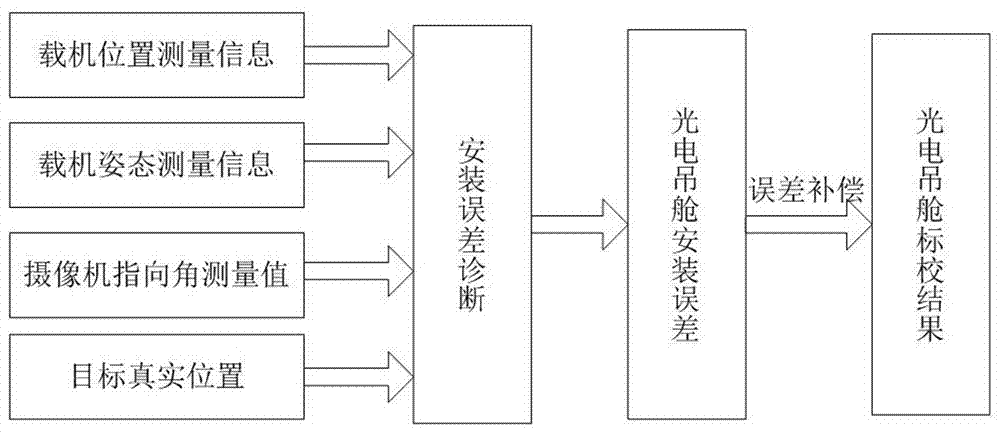
[0059] The installation error calibration process of UAV photoelectric pod is as follows: figure 1 As shown, the implementation is divided into the following steps:
[0060] Step 1, first determine a ground cooperative target point, and use high-precision differential GPS to obtain the latitude, longitude and elevation of this point;
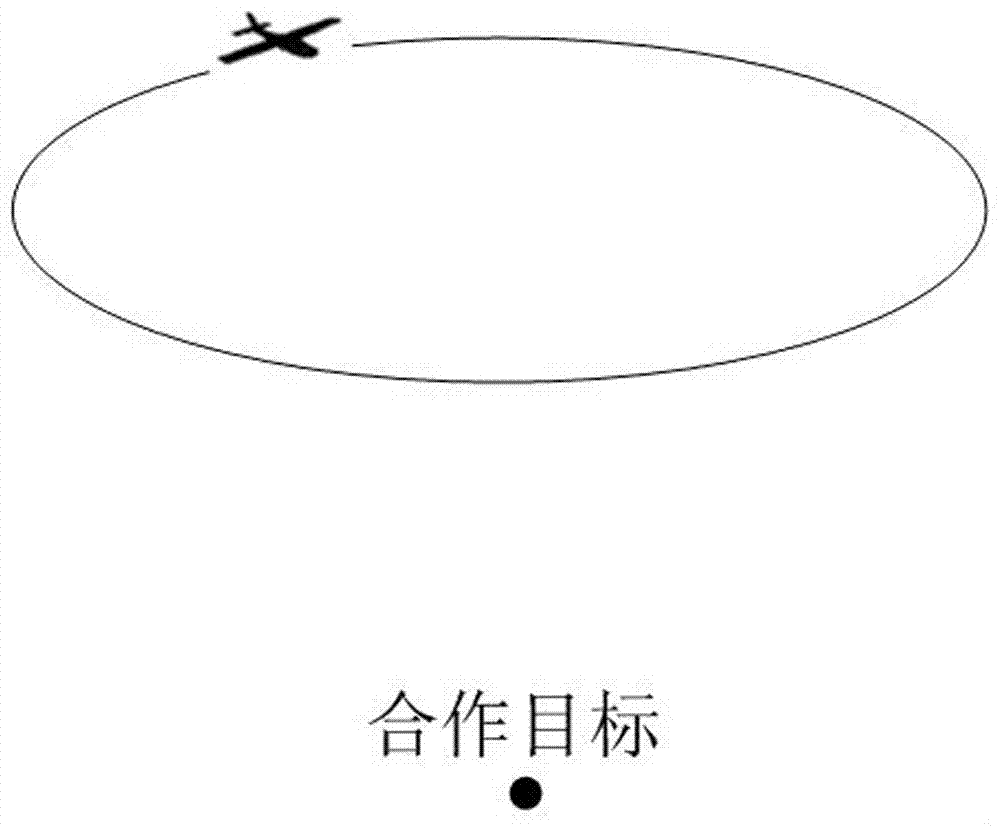
[0061] Step two, such as figure 2 As shown in Fig. 1, the UAV hovers over the cooperative target point, adjusts the photoelect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More