An adaptive cruise control method for electric vehicles with optimal switching of drive and brake
A technology of adaptive cruise and control method, applied in the direction of electric vehicles, control drives, control devices, etc., can solve the problems that the four-wheel independent drive electric vehicles cannot be directly applied, no consideration, and the service life of the adaptive cruise control system is reduced.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
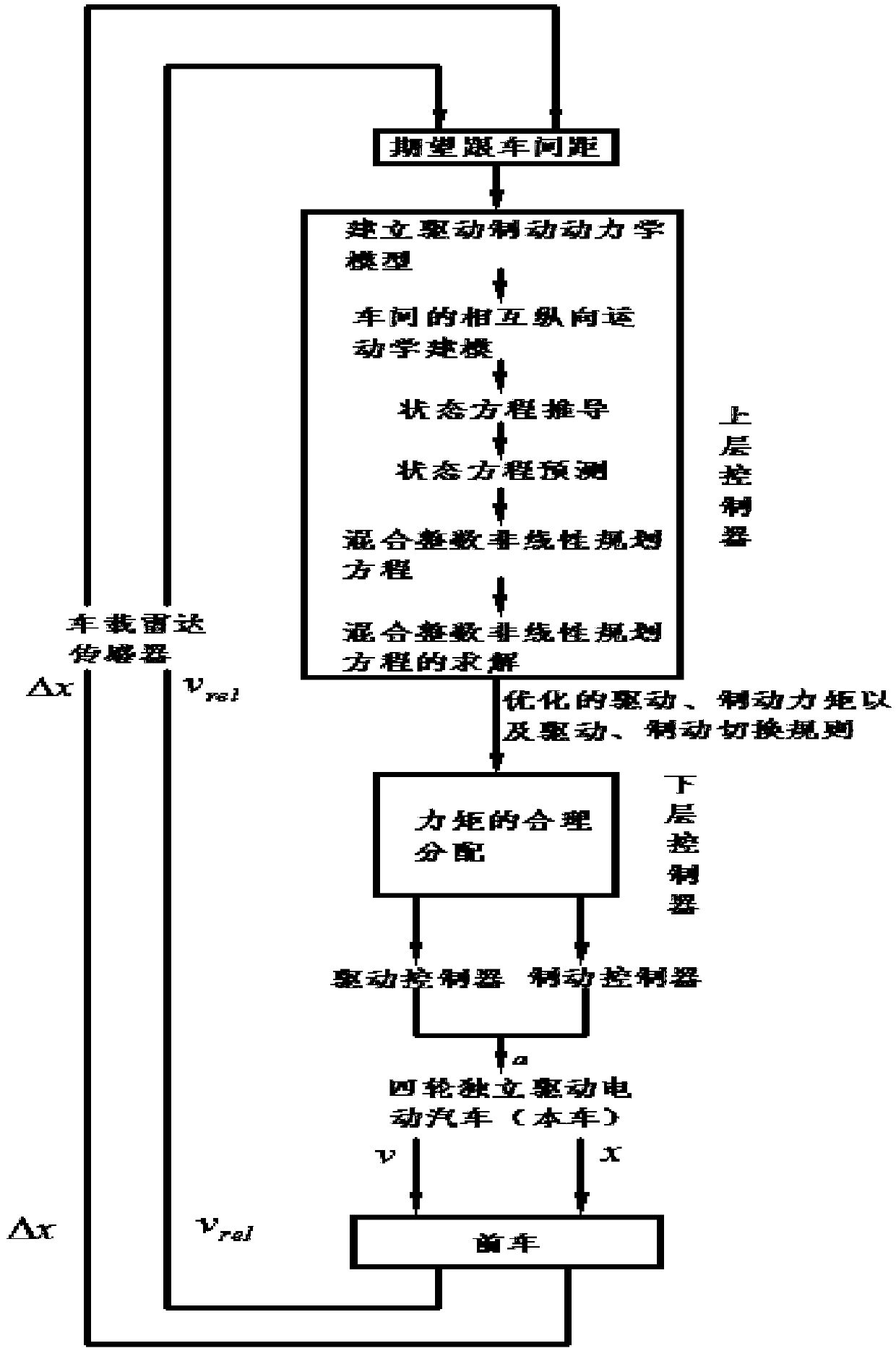
[0092] The present invention will be further described below in conjunction with the drawings. Such as figure 1 As shown, the vehicle-mounted radar sensor has learned the distance error δ(k) between the preceding vehicle and the vehicle, and the relative speed v of the preceding vehicle and the vehicle rel (k) Compare with the expected follow-up distance of the system, and input the result to the upper controller. In order to better reflect the driving and braking characteristics of the car and improve the design accuracy of the upper controller, the upper controller first establishes the driving and braking dynamic equations. Select the distance between the vehicle ahead and the vehicle, the speed of the vehicle in front, the relative speed of the vehicle in front and the vehicle, the acceleration of the vehicle and the rate of change of the acceleration of the vehicle as the state variables of the prediction equation, and the acceleration of the vehicle in front as the distu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More