

Precisely controlled intelligent four-rotor unmanned aerial vehicle
A quadrotor unmanned aerial vehicle, an intelligent technology, applied in the field of unmanned aerial vehicles, can solve the problems of ensuring the rotating speed of the rotors, difficult flying operation of the unmanned aerial vehicle, low control accuracy, etc., and achieve the effect of precise operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
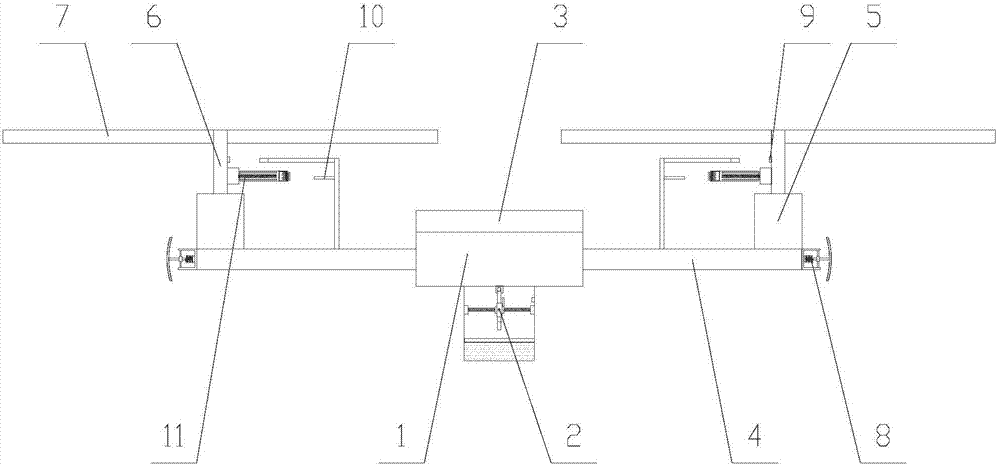
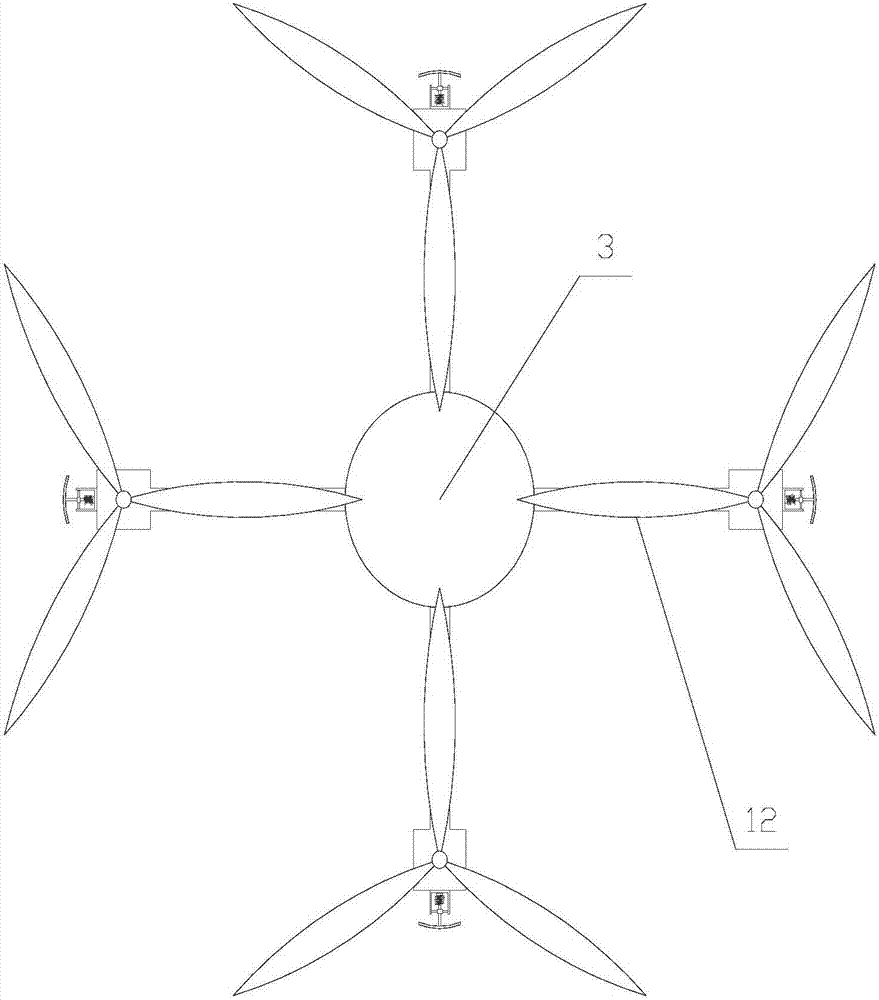
[0033] Such as Figure 1-Figure 6 As shown, an intelligent four-rotor UAV with precise control includes a main body 1, a deflection measurement mechanism 2 arranged under the main body 1, and several flying units 12, and the flying units 12 are evenly distributed on the outer periphery of the main body 1 in the circumferential direction. ;
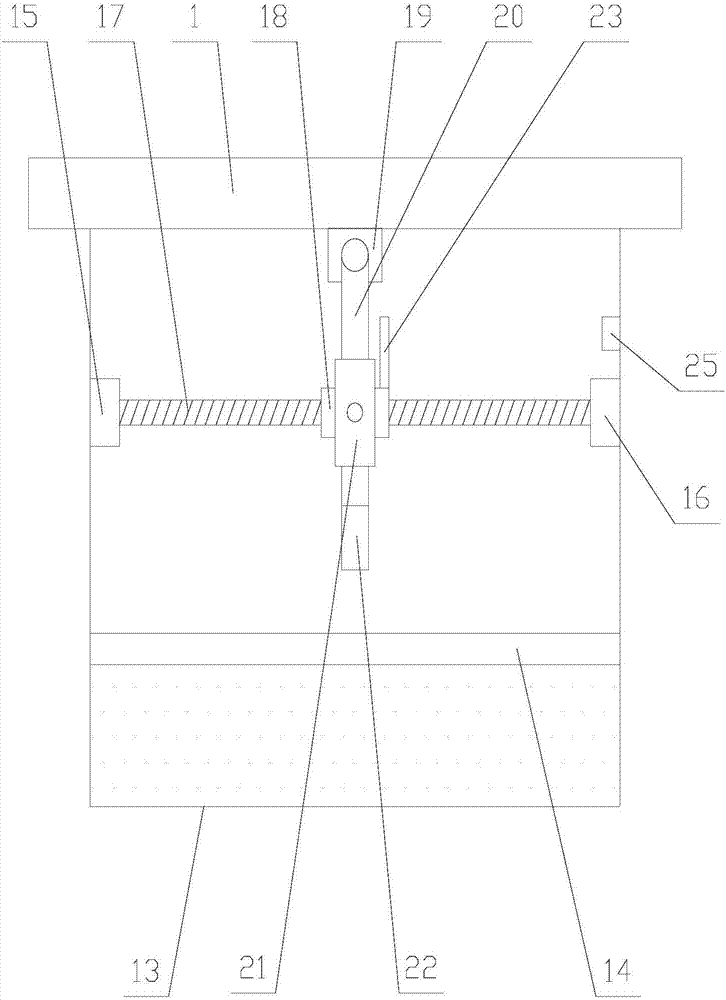
[0034] The deflection measurement mechanism 2 includes a housing 13, the bottom of the housing 13 is provided with an aqueous solution, the housing 13 is provided with a reflector 14 and a deflection measurement assembly, the reflector 14 floats on the aqueous solution, and the deflection measurement The assembly is arra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More