

Bionic prosthetic hand and device based on 3D printing
A 3D printing and prosthetic hand technology, applied in the field of prosthetics, can solve problems such as cumbersome manufacturing process, high cost, and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0038] In order to facilitate the understanding of this embodiment, the 3D printing-based bionic prosthetic hand disclosed in the embodiment of the present invention is first introduced in detail.
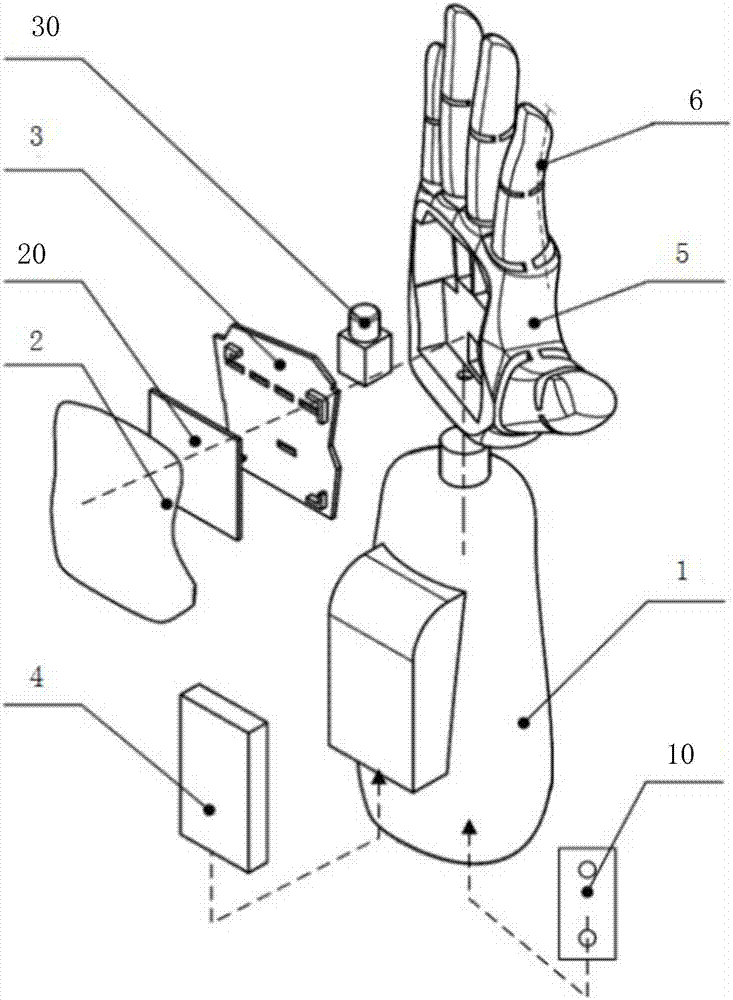
[0039] figure 2 Schematic diagram of the structure of the bionic prosthetic hand based on 3D printing provided by the embodiment of the present invention.
[0040] refer to figure 2, the bionic prosthetic hand based on 3D printing includes: myoelectric signal sensor 10, single-chip microcomputer 20, servo motor 30, transmission structure 40 and actuator 50;
[0041] Myoelectric signal sensor 10 is connected with single-chip microcomputer 20, is used for collecting original myoelectric signal, and sends pulse signal to single-chip microcomputer 20;
[0042] The single-chip microcomputer 20 is connected with the servo motor 30, and is used to correspondingly send a drive signal to the servo motor 30 according to the pulse signal;
[0043] The servo motor 30 is connected with the...
Embodiment 2
[0074] Image 6 Another schematic diagram of the structure of the bionic prosthetic hand based on 3D printing provided by the embodiment of the present invention.
[0075] refer to Image 6 , the structural composition relationship of the bionic prosthetic hand based on 3D printing is as follows: the muscle electrical signal sensor 10 transmits the collected muscle electrical signal to the single-chip microcomputer 20, and the single-chip microcomputer 20 converts it into the required motor motion signal according to the program, and further, the servo The motor 30 drives the motion implementing structure 50 through the transmission structure 40 to realize the motion of the prosthesis. Here, the transmission structure 40 includes a traction rope. The power supply can directly supply power to each electronic component such as the single-chip microcomputer 20, and also can only supply power to the single-chip microcomputer 20, and then the single-chip microcomputer 20 supplies...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More