

Double-vision tracking device and method used for omni-directional movement robot
An omnidirectional movement and robot technology, applied in the field of dual vision tracking devices, can solve the problems of robot tracking accuracy drop, obstacle or wall collision, etc., and achieve the effect of improving path tracking accuracy and precise tracking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
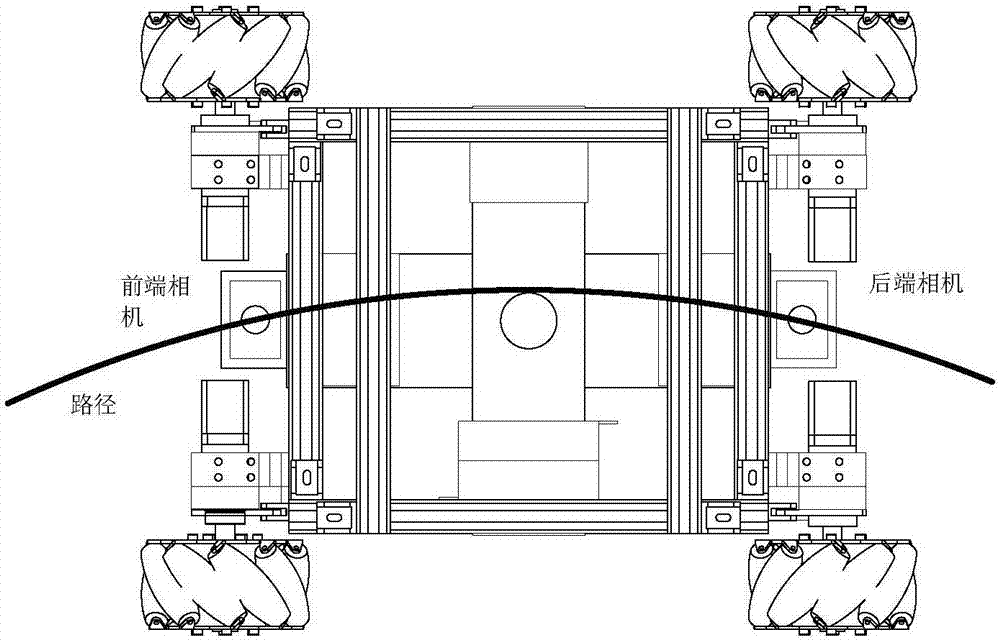
[0036] Such as Figure 4 Shown, the embodiment of the present invention is that the wheel radius of the medium-sized Mecanum wheel robot is 110mm, and the half-vehicle length is 363mm, and the half-vehicle width is 408mm. The motion controller is iEi embedded single-board computer WAFER-945GSE2, the visual tracking system tracking camera is a USB industrial camera, the image processor is Advantech MIO-2261N-S6A1E motherboard, and the two cameras are respectively fixed on the front and rear of the robot. end.
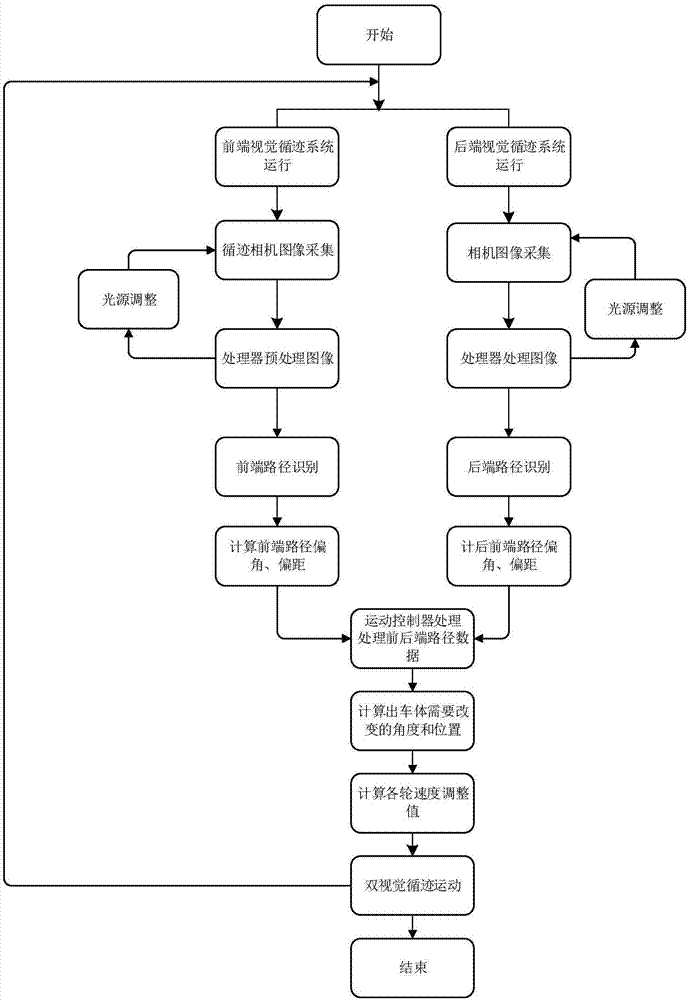
[0037] The specific process of the dual-vision tracking method for omnidirectional mobile robots is as follows:
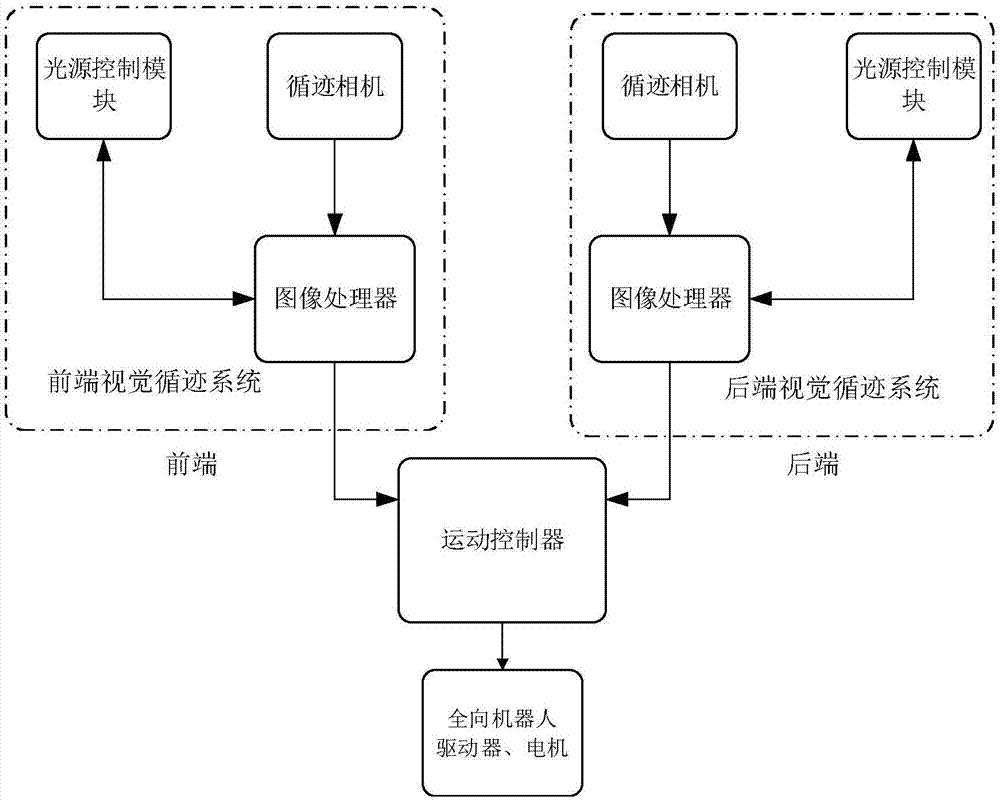
[0038] Step 10) After the power is turned on, each processor and camera enters the working state, USB camera 1 and USB camera 2 start image acquisition respectively, USB camera 1 acquires the front-end path image of the robot body, and USB camera 2 acquires the robot body rear-end path image, and send the image to image processor 1 and image processor 2 thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More