

Man-machine cooperation path planning method for agriculture mobile robot based on cloud model
A mobile robot and path planning technology, applied in the direction of navigation computing tools, etc., can solve the problem that agricultural robots cannot independently plan operations, and achieve the effect of reducing time delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
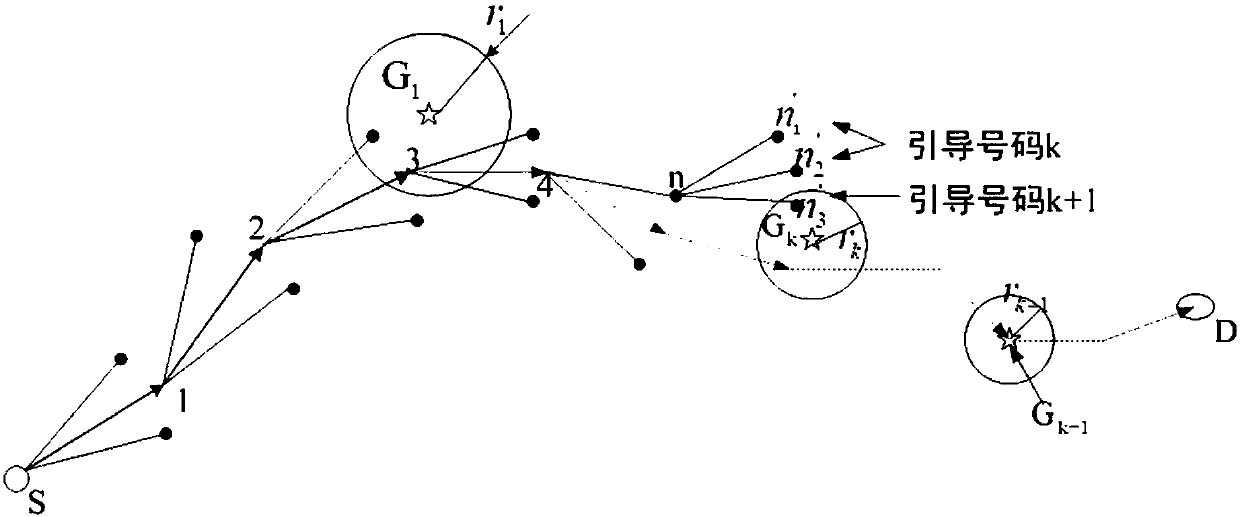
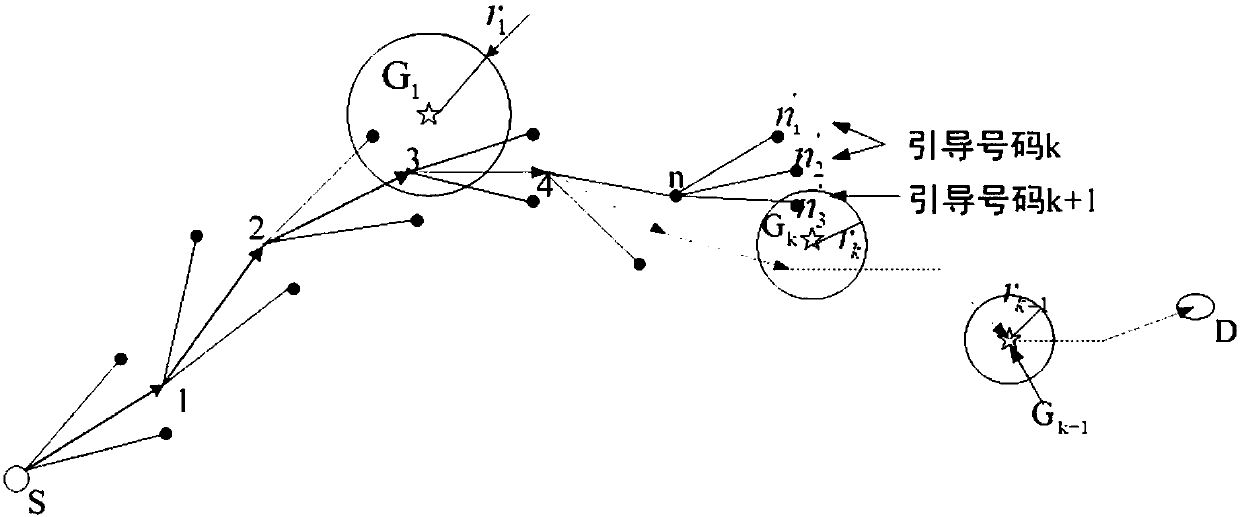
[0037] The present invention proposes a dynamic guided A* (DGA*) algorithm for human-computer cooperation path planning, and at the same time combines human professional knowledge and preferences to form an expert system and introduces online uncertainty reasoning based on cloud models to achieve faster path planning Strategy.
[0038] The specific steps are briefly described below in conjunction with the accompanying drawings:
[0039] Step 1) collect the position of the robot, and use the four-dimensional vector (x * ,y * , θ * , φ * ) represents its position information in a two-dimensional plane, where x * ,y * Represent the values of the robot in the x-axis direction and y-axis dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More