

Frogging mechanical exoskeleton system with energy recycling function and frogging method thereof
A technology of energy recovery and exoskeleton, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor stability and compliance, high energy consumption of exoskeletons, and heavy weight, so as to improve stability and Flexibility, self-weight reduction, and injury-avoiding effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
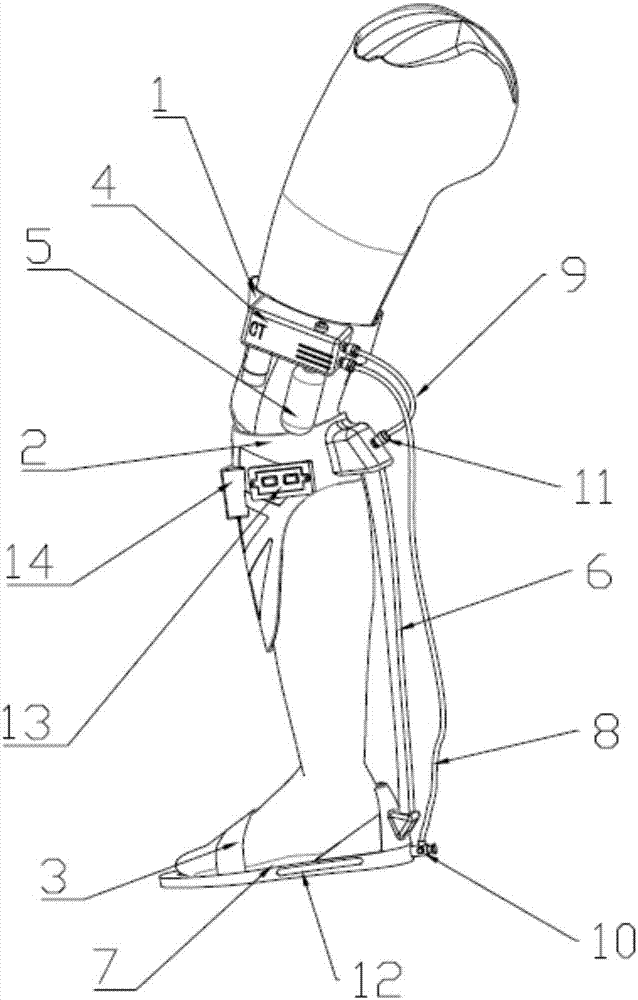
[0030] Such as Figure 1-Figure 2 As shown, a jump-increasing mechanical exoskeleton system with energy recovery and reuse functions includes an exoskeleton body worn from the thigh to the sole of the foot and a control system, and the exoskeleton body includes a first fixing part worn on the thigh 1. The second fixing part 2 worn on the knee and the third fixing part 3 worn on the foot. The first fixing part 1 and the second fixing part 2 are integrated, and also include an air pump 4 and a gas storage bottle 5. Pneumatic muscles 6 and plantar gas recovery airbags 7, the air pump 4 and gas cylinder 5 are fixed on the first fixed part 1, one end of the pneumatic muscles 6 is fixed on the second fixed part 2, and the other One end is fixed on the third fixed part 3, the plantar gas recovery air bag 7 is fixed on the third fixed part 3, and the air pump 4 communicates with the gas storage bottle 5 through the first air delivery pipe (not shown) , the plantar gas recovery air ba...
specific Embodiment approach 2
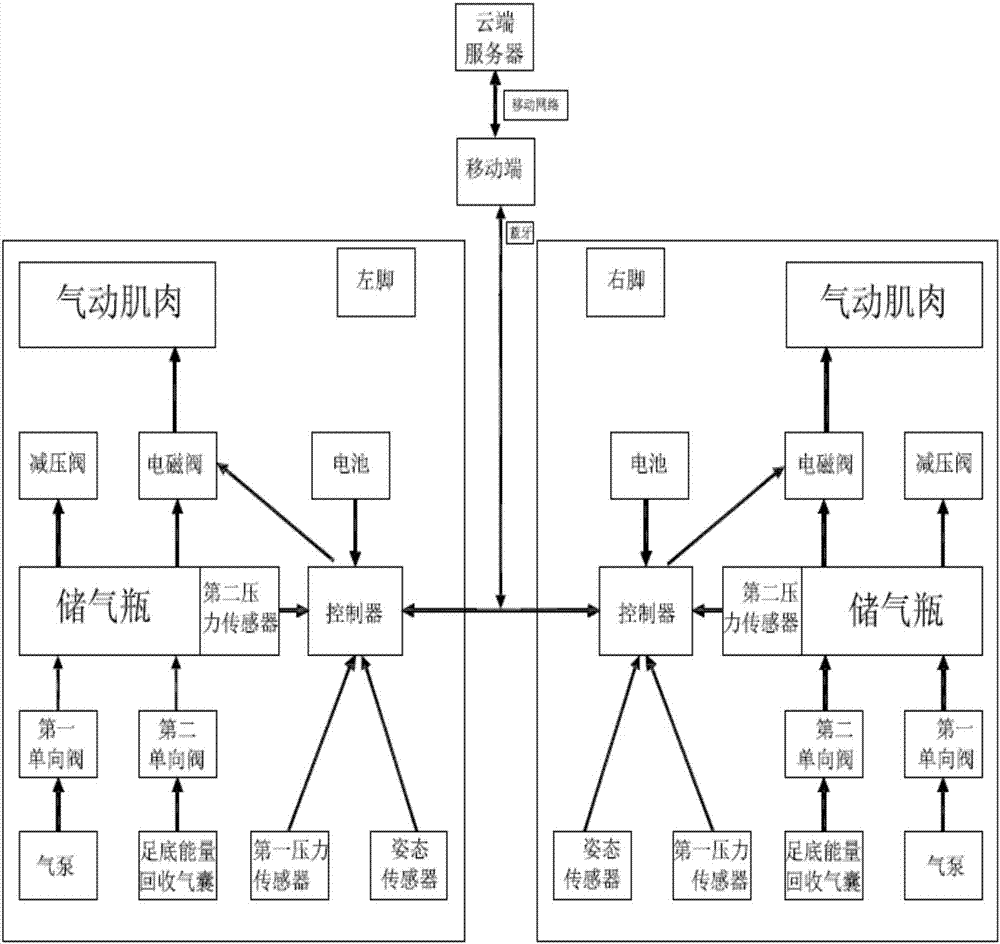
[0033] Different from Embodiment 1, in this embodiment, a jump-increasing exoskeleton system with energy recovery and reuse function, the gas storage bottle 5 is provided with a second pressure sensor (not shown), so The second pressure sensor is electrically connected to the controller 14, and the air pump 4 is provided with a relay (not shown), and the controller 14 controls the opening and closing of the relay by receiving the signal of the second pressure sensor. The second pressure sensor is used to detect the pressure in the gas storage cylinder. When the pressure is too high, the controller 14 will control the relay to power off, so that the air pump 4 no longer inflates the gas storage cylinder 5;
[0034] The gas storage bottle 5 is also provided with a pressure relief valve, and the pressure relief valve mainly plays a protective role. When the gas pressure in the gas storage bottle 5 exceeds the set value of the pressure relief valve, the pressure relief valve will ...
specific Embodiment approach 3
[0036] Different from the second specific embodiment, a jump-increasing exoskeleton system with energy recovery and reuse function under this embodiment also includes a mobile terminal, and the control system and the mobile terminal realize wireless data transmission through Bluetooth. The mobile terminal is connected to the cloud server through the mobile network, and the data is transmitted wirelessly according to the training situation of the wearer, and is transmitted to the mobile terminal APP by this system. The mobile terminal APP judges the corresponding jumping strength according to the training data of the wearer, and timely Unlocking the air pressure of the air pump enables the wearer to increase jumps with different strengths, so that the wearer can gradually adapt to the exoskeleton and gradually increase the elasticity of the exoskeleton.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More