

Visual sense guide vehicle parking method based on two-dimensional code and visual sense guide vehicle
A technology of vision guidance and positioning method, applied in the field of vision guidance vehicles, which can solve the problems affecting the accurate positioning and transportation efficiency of vision guidance vehicles, deviation of the driving direction of vision guidance vehicles, and high environmental requirements, so as to eliminate yaw and derailment events, self-weight reduction, and the effect of increasing the load weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings.
[0023] Such as figure 1 shown, combined with Figure 1-4 The specific implementation of the present invention is described as follows:
[0024] A method for positioning a visually guided vehicle based on a two-dimensional code, comprising the following steps:
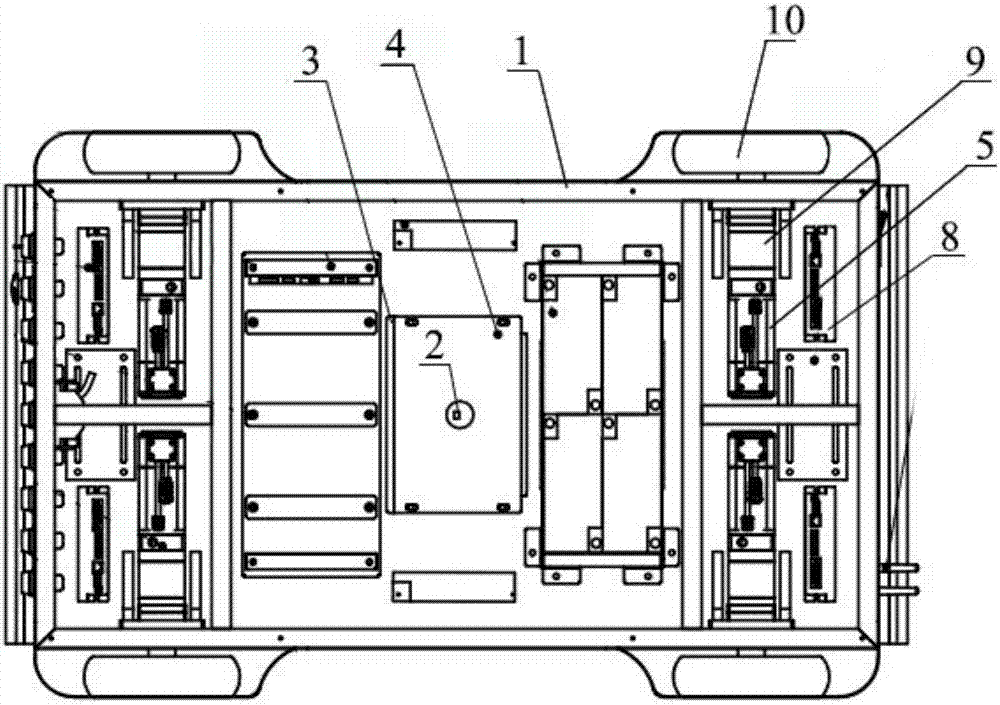
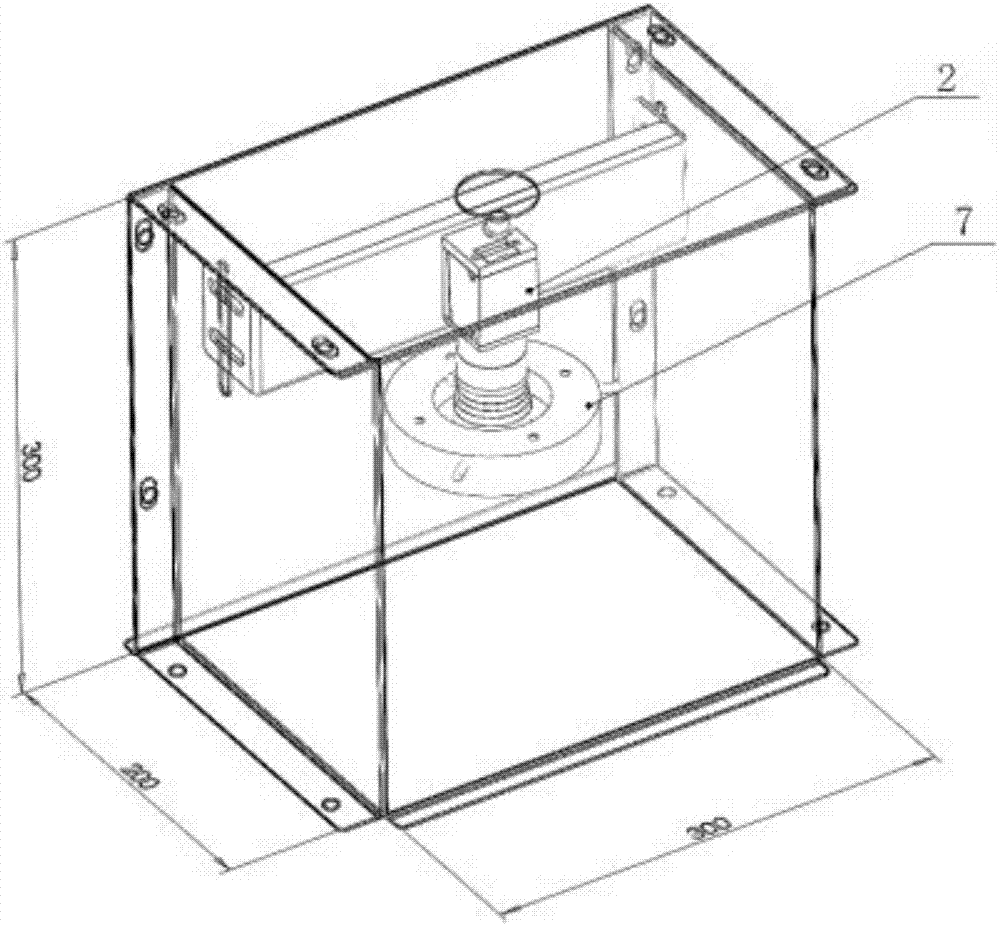
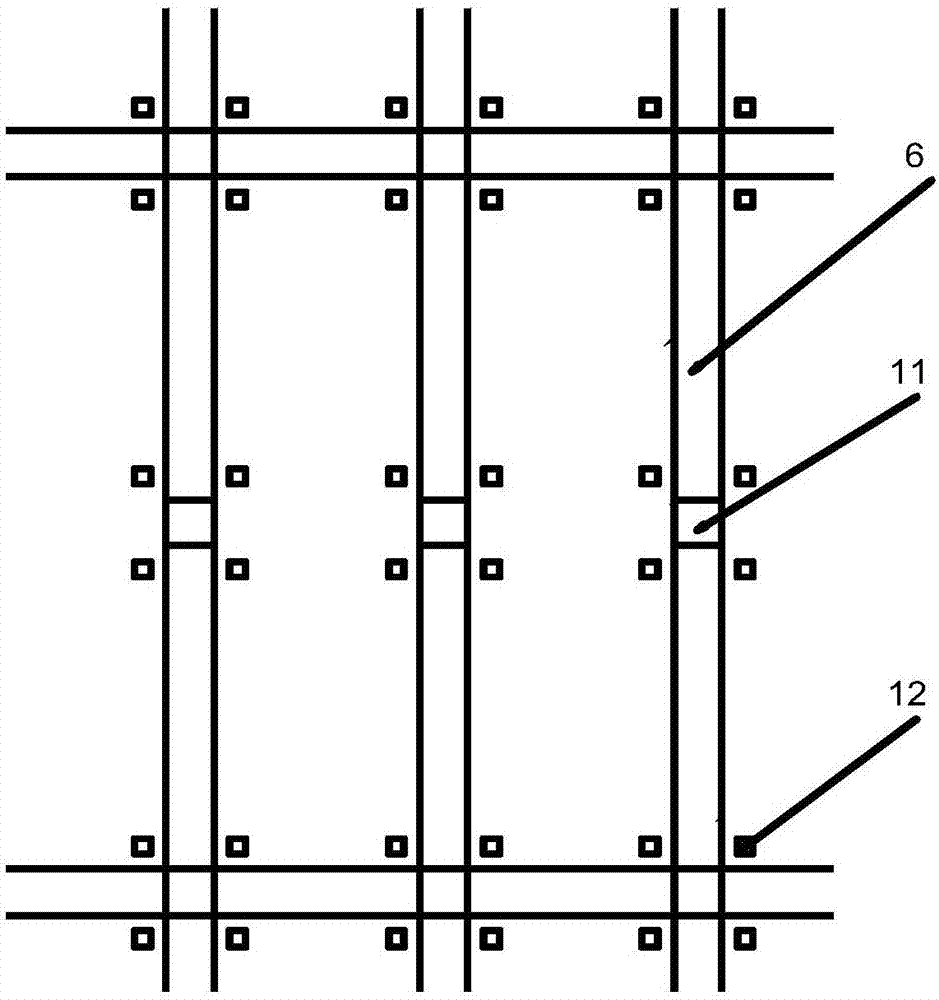
[0025] Step 1), set up a grid positioning system on the ground of the application site of the vision-guided vehicle 1, the grid positioning system includes a grid and a plurality of station QR code labels 11 set on the grid, set on the grid Black adhesive tape 6 is arranged, and the two-dimensional code label 11 of the station stores the information of this station and the distance information with the adjacent stations. Four square positioning blocks 12 are attached to the four corners of the two-dimensional code label 11 of the station. The rectan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More