

Target trajectory tracking method of mobile robot
A mobile robot, target trajectory technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc. Extend the effective working time and life, reduce the mechanical and energy consumption of the system, and the smooth and continuous effect of the change of the control amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0075] The present invention will be further described below with reference to the accompanying drawings and embodiments.
[0076] The target trajectory tracking method for a mobile robot in this embodiment includes the following steps:
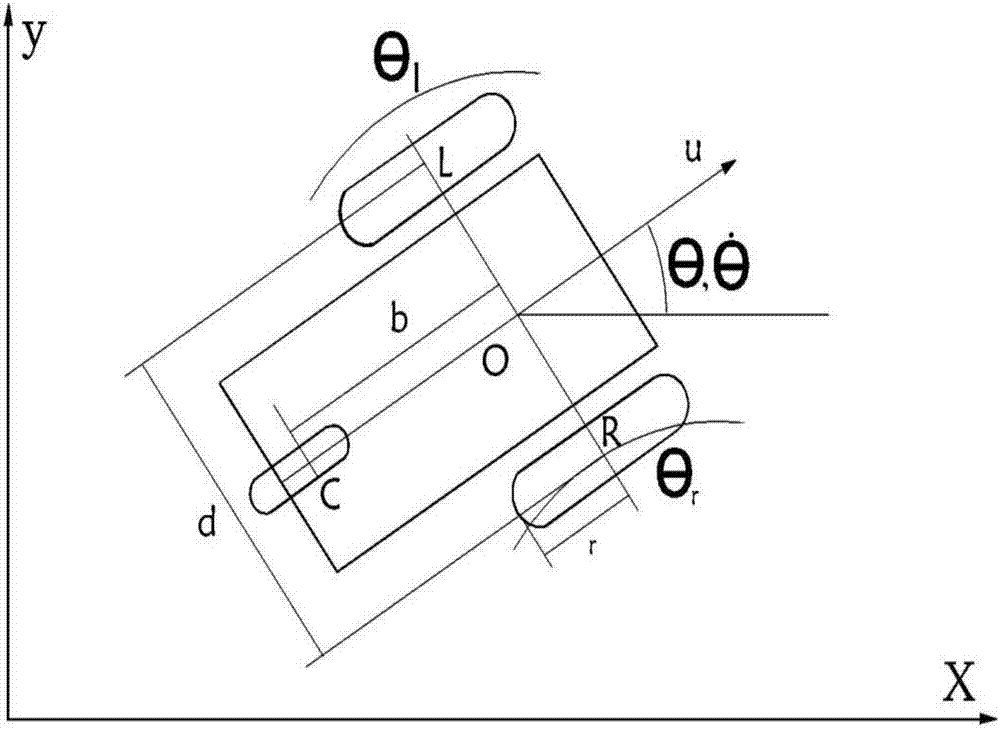
[0077] 1) Establish the motion equation of the mobile robot:
[0078]
[0079]
[0080] In the formula, u is the movement speed of the robot; θ is the forward direction angle of the robot; m represents the mass of the robot chassis; J 0 is the moment of inertia of the robot chassis relative to the midpoint of the wheelbase of the two driving wheels of the robot; F r and F l Represents the driving force acting on the two driving wheels of the robot; F cx with F cy Represents the wheel at x b and y b ground friction in the direction; y b The direction is the axial direction of the two driving wheels, x b direction perpendicular to y b direction; d is the distance between the two driving wheels; b is the distance between the axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More