

System for controlling automatic car-following operation and method thereof
A driving control and auto-following technology, applied in control devices, vehicle components, driver input parameters, etc., can solve the problems of low precision, dangerous rear vehicles, poor steering handling at large corners, etc., to ensure reliability and control accuracy. , high reliability and adaptability, the effect of shortening the following distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
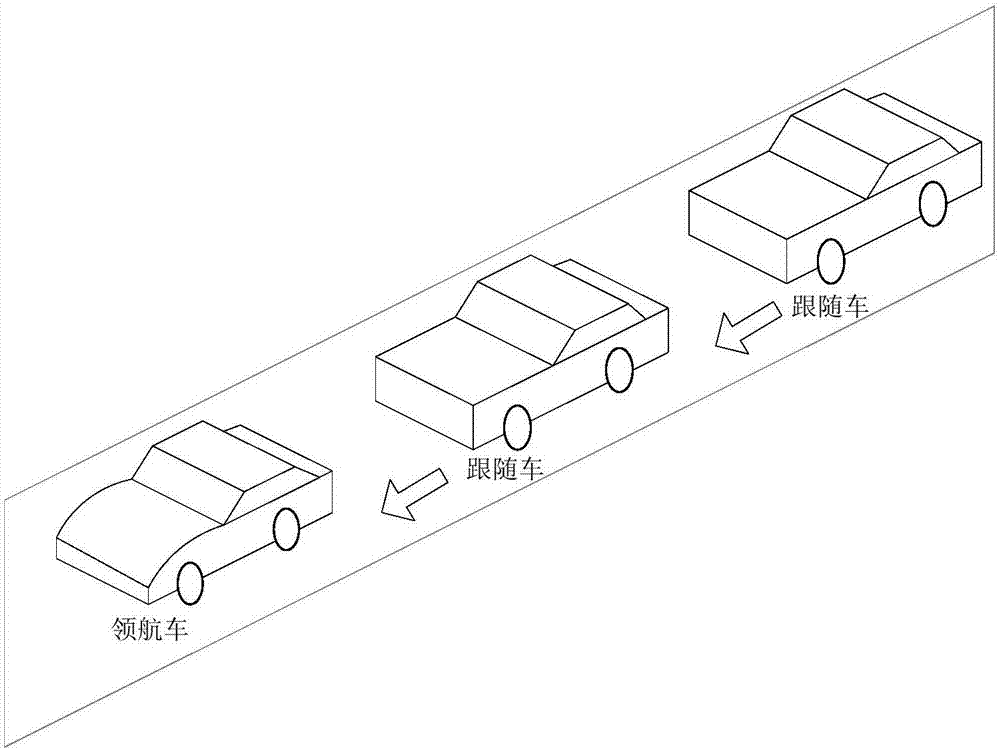
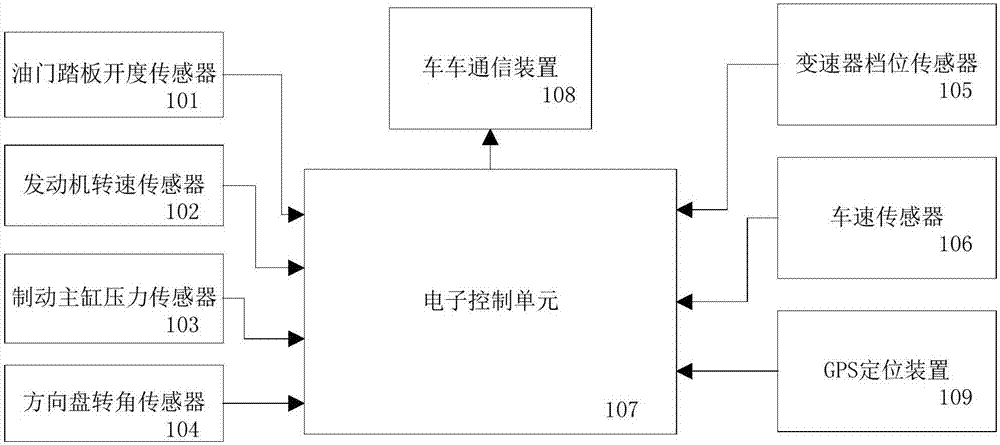
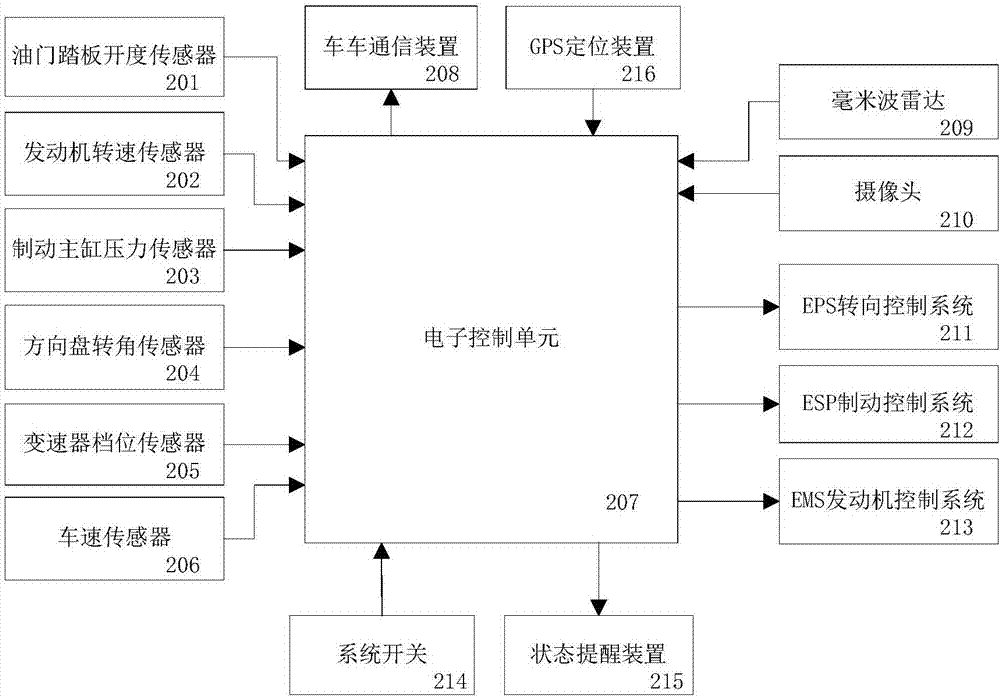
[0024] This embodiment provides an automatic vehicle-following control system. Such as figure 1 As shown, the application scenario of the automatic following vehicle driving control system of the present invention is a driving system composed of a leading vehicle and at least one following vehicle. The data transmission between the leading car and the following car is carried out through the installed vehicle-to-vehicle communication device. The leading car needs the driver to drive, and the following car can be driven by the driver. It can be switched to the automatic follow-up driving mode, and the accelerator, brake and steering operations are all carried out automatically, and it follows the vehicle in front. When the number of following cars is greater than 1, the previous following car can be used as the leading car of the following following car. The vehicle-to-vehicle communication device in the present invention can be a communication terminal D-BOX using the DSRC p...
Embodiment 2
[0186] This embodiment provides a method for controlling automatic car following, which is used in the automatic following control system of the above-mentioned embodiment 1, and mainly includes the following steps:
[0187] S100: Pilot car signal collection
[0188] The electronic control unit of the pilot car is periodic, for example, the following signals of the pilot car are collected at a period of 10ms: throttle opening signal α 1 , engine speed signal n M1 , brake pressure signal p1, steering wheel angle signal δ 1 , transmission gear position signal i 1 , the speed signal v 1 , positioning coordinates (x1, y1) and heading angle ψ 1 , and send the collected signal and the vehicle code number of the pilot vehicle to the vehicle-to-vehicle communication device of the pilot vehicle.
[0189] S200: Leading car signal reception and following car signal collection
[0190] The electronic control unit of the following vehicle periodically receives the signal sent by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More