

Robot three-dimensional scanning device and robot three-dimensional scanning method
A technology of three-dimensional scanning and robotics, applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problems of scanning blind spots, low scanning accuracy, long scanning time, etc., to achieve increased working range, high scanning accuracy, and scanning speed fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings.
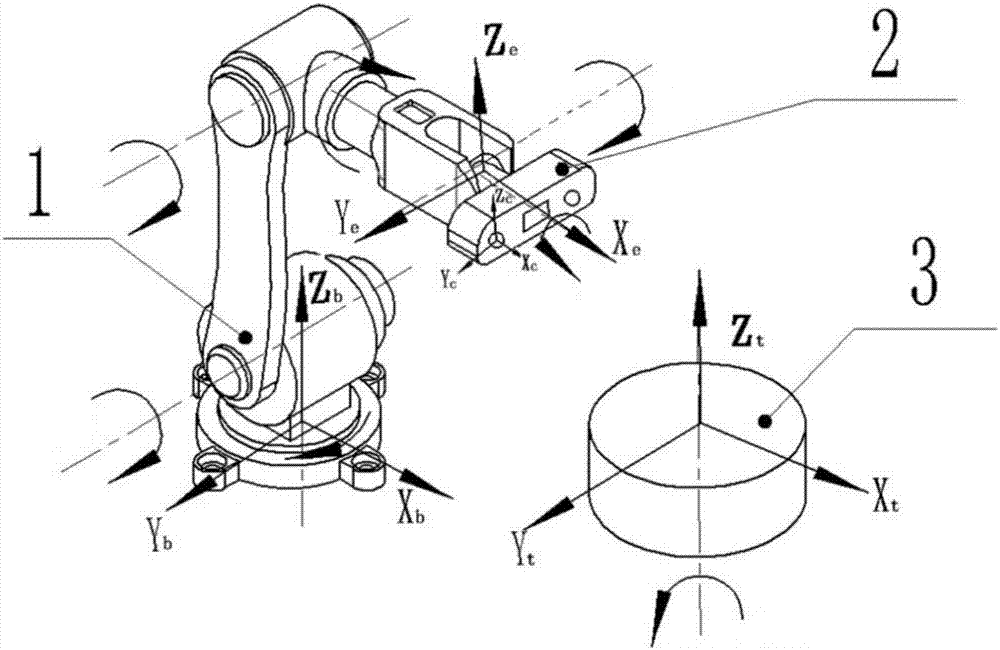
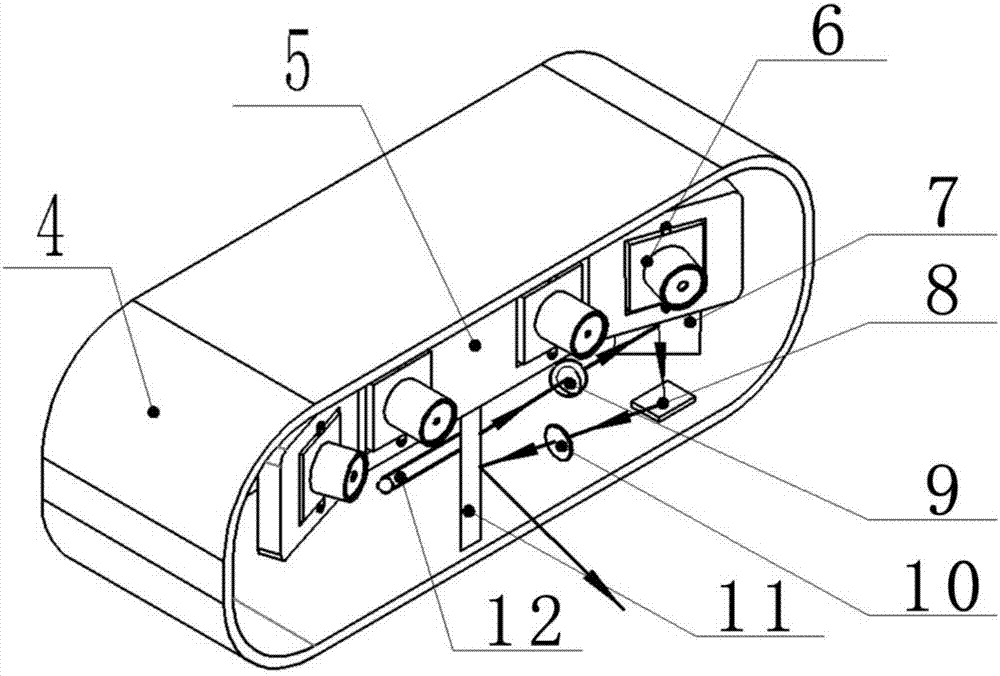
[0030] A robot three-dimensional scanning device ( figure 1 shown) is composed of six-axis robotic arm (1), MEMS scanning galvanometer laser three-dimensional measuring head (2), and turntable (3); among them, MEMS scanning galvanometer laser three-dimensional measuring head ( figure 2 Shown) consists of MEMS probe housing (4), camera support plate (5), CCD camera (6), mirror surface (7), MEMS vibrating mirror (8), collimating lens (9), aspheric lens (10) , a reflector (11) and a laser (12), and the scanning measuring head is placed at the end of the six-axis mechanical arm.
[0031] The MEMS scanning galvanometer laser three-dimensional measuring head ( figure 2shown), the arrow represents the laser light path, and the part that the light path passes is the laser MEMS projection device, and its working method is as follows: the laser beam emitted by the laser is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More