Parawing four-freedom-degree semi-physical simulation platform
A semi-physical simulation and simulation platform technology, which is applied in the field of semi-physical simulation platform with four degrees of freedom of parafoil, can solve the problem that the real-time motion of parafoil cannot be completely simulated, and achieve the effect of simple structure and strong expansibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0028] A parafoil four-degree-of-freedom semi-physical simulation platform includes a data acquisition system, a motion control system, an parachute control system, and a model state solution system.
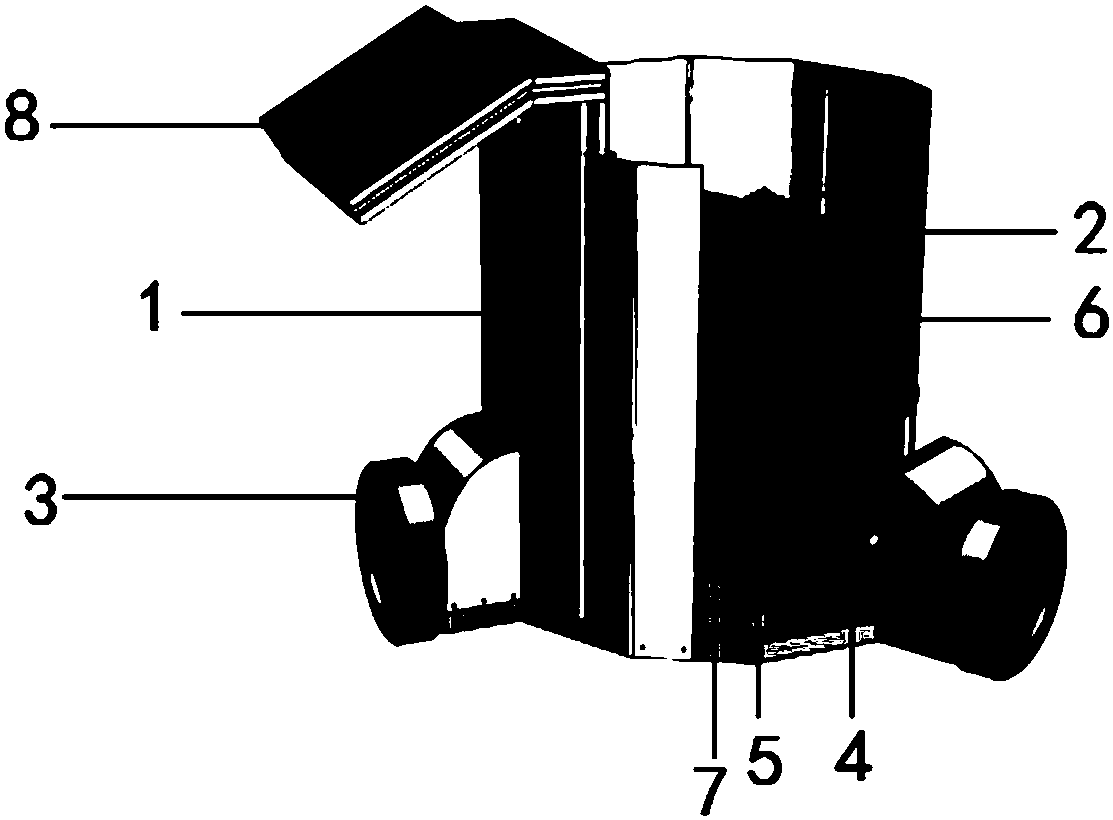
[0029] Such as figure 1 As shown, the platform has a shell 1, three omnidirectional wheels 3 are installed on the outer wall of the lower end of the shell, and the angle between two adjacent omnidirectional wheels is 120°; three servo motors 4, motor Driver 5, lithium battery and inverter 7 are used to drive three omnidirectional wheels. The interior of the casing is located near the center of mass of the system and is equipped with an inertial navigation and GPS sensor 2, and a receiving device for the GPS sensor is installed on the casing; an industrial computer 6 is also installed inside the casing, which communicates with the inertial na...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com