

Spacecraft attitude fault-tolerant control method based on iterative-learning disturbance observer
A technology of disturbance observer and iterative learning, applied in attitude control, program control, computer control, etc., can solve the problem of not considering actuator installation deviation and external disturbance, and less consideration of actuator installation deviation. Issues such as closed-loop stability system performance of the upper system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
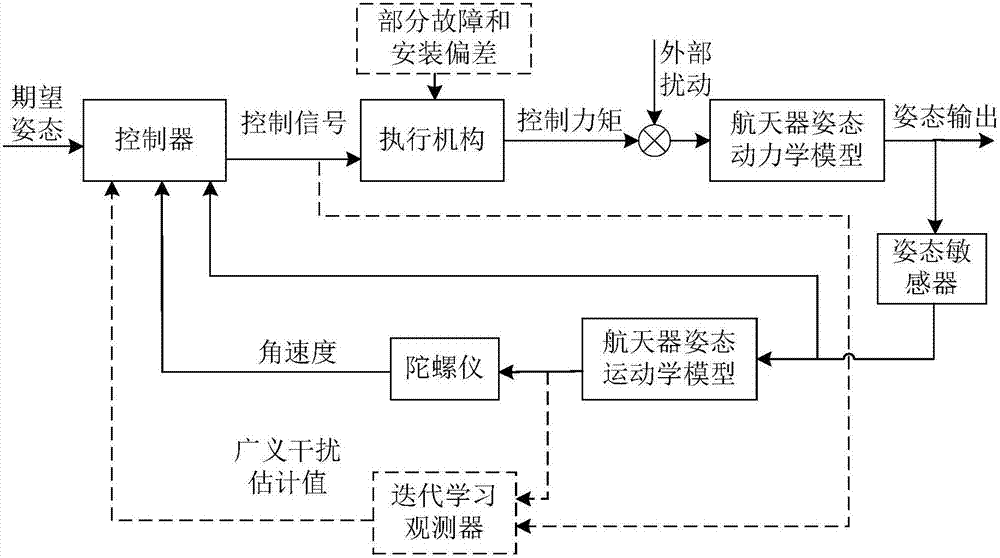
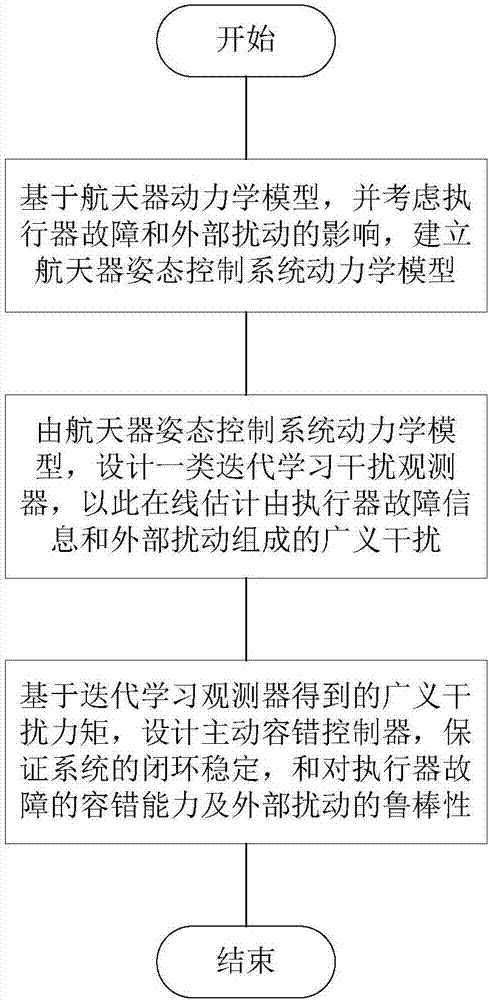
[0038] like figure 2 As shown, the steps of a spacecraft attitude fault-tolerant control method based on iterative learning interference observer of the present invention are: firstly establish a spacecraft attitude control system model considering actuator faults and external disturbances; then design based on the spacecraft attitude control system model The iterative learning disturbance observer is used to estimate the generalized disturbance online. Finally, the active fault-tolerant controller is designed. The specific implementation steps are as follows:
[0039] The first step is to establish the kinematic equation of the spacecraft attitude control system model as:
[0040]
[0041]
[0042] in, Represents the scalar part of the attitude unit quaternion of the spacecraft, which is related to the angle of rotation around the Euler axis, θ represents an angle rotated around the Euler axis, q v =[q 1 ,q 2 ,q 3 ] T is a column vector with three elements, rela...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More