

Rotary inertia identification method and identification device
A technology of moment of inertia and identification method, which is applied in the field of moment of inertia identification, and can solve problems such as inertia estimation error, torque fluctuation sampling point reduction, and static error of identification results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
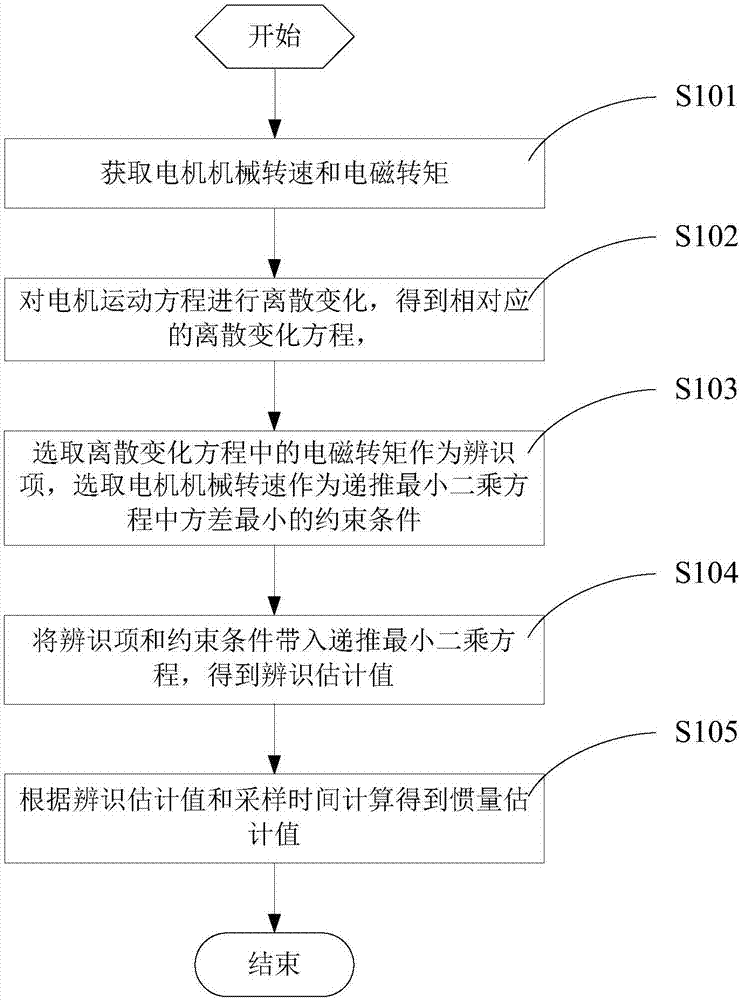
[0100] When the motor motion equation is discretely changed to obtain the corresponding first-order discrete equation, step S102 in the above embodiment specifically includes:
[0101] The motor equation of motion shown in formula (1) is carried out discretization change, obtains the first-order discrete equation as shown in formula (5), and described formula (5) is specifically as follows:
[0102]
[0103] Correspondingly, step S103 specifically includes:
[0104] Select the electromagnetic torque T in the discrete variation equation e as discriminator y k ,y k = ω m [k]-2ω m [k-1]+ω m [k-2], select the motor mechanical speed ω in the discrete variation equation m As a constraint on the minimum variance in the recursive least squares equation ψ k , ψ k =T e [k-1]-T e [k-1].
[0105] In the identification term y k and the constraints ψ k Bring in the recursive least squares equation shown in formula (2) to formula (4) to get the identification estimated value ...
Embodiment 2
[0113] When the motor motion equation is discretely changed to obtain the corresponding second-order discrete equation, step S102 in the above embodiment specifically includes:
[0114] The motor equation of motion shown in formula (1) is carried out discretization change, obtains the second-order discrete equation as shown in formula (7), and described formula (7) is specifically as follows:
[0115]
[0116] Correspondingly, step S103 specifically includes:
[0117] Select the electromagnetic torque T in the discrete variation equation e as discriminator y k ,y k =T e [k-1], select the motor mechanical speed ω in the discrete variation equation m As a constraint on the minimum variance in the recursive least squares equation ψ k ,
[0118] In the identification term y k and the constraints ψ k Bring in the recursive least squares equation shown in formula (2) to formula (4) to get the identification estimated value θ k Afterwards, step S105 in the above embodim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More