

Auxiliary brake device for water body robot and using method
A robot-assisted and braking device technology, which is applied to the steering device, transportation and packaging, and steering with an extendable baffle, can solve the problems of loss of rudder effect, slow braking effect, narrow application area, etc., and achieve controllability , Easy installation and simple maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
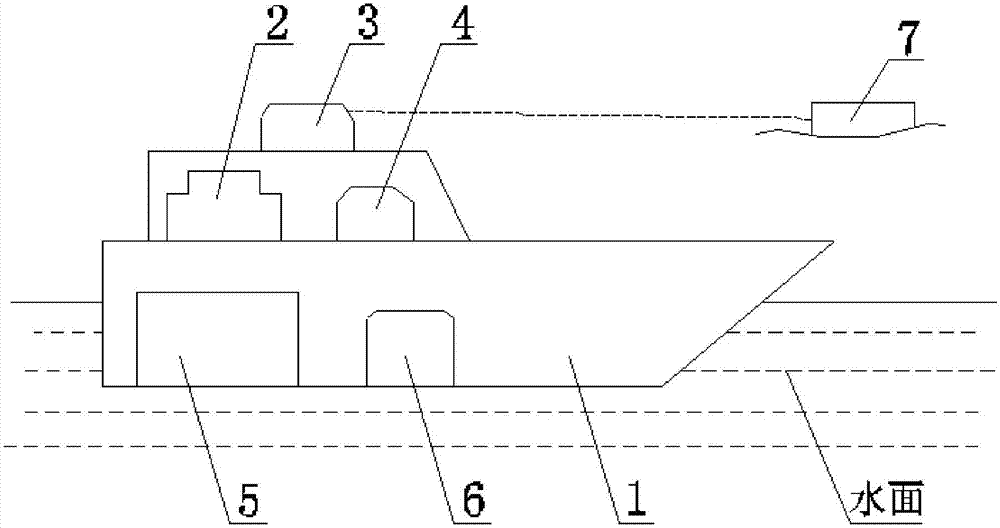
[0037] Such as Figure 1~5 As shown, Embodiment 1 of the present invention provides an auxiliary braking device for a water area robot, which can be applied to various water area robots such as unmanned ships or underwater robots.
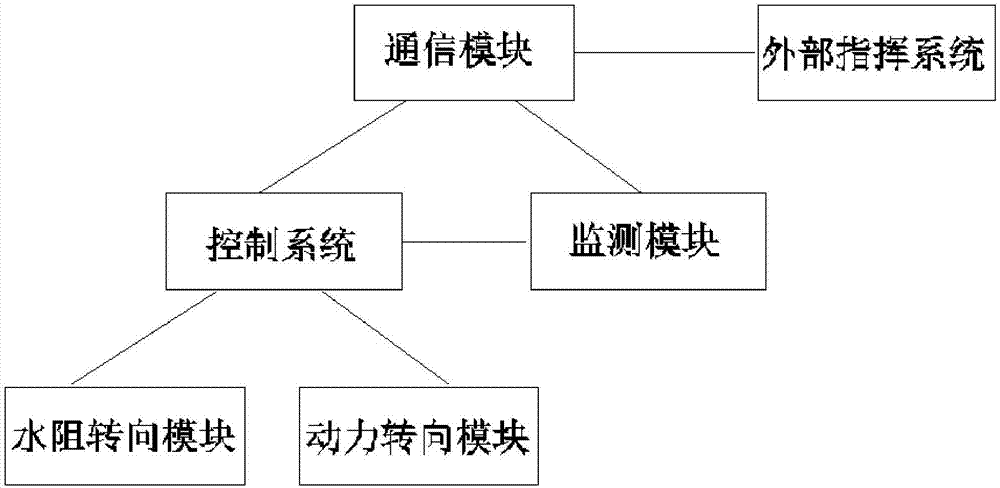
[0038] An auxiliary braking device for a water area robot, comprising a hull 1, in which a control system 2, a communication module 3, a monitoring module 4, a dynamic braking module 5 and a water resistance braking module 6 are arranged; the control system 2, The communication module 3 and the monitoring module 4 are connected in pairs; the control system 2 and the external command system 7 send signals to each other through the communication module 3, and the monitoring module 4 can monitor the status information of the water area robot in real time, and the obtained status information can be transmitted to the control system respectively 2 and external command system 7 for real-time control.
[0039] The control system 2 is respectively connect...
Embodiment 2
[0049] In the use method of the auxiliary braking device of the robot in this water area, there are many methods for making the brake characteristic library, such as by carrying out real ship sea experiments, establishing a mathematical model and a simulation system to obtain reference data, because the application of the simulation system is relatively large. Wide range, high experimental efficiency, in the embodiment of the present invention, various simulation system experiments are usually used to make the brake characteristic library. The process of making the brake characteristic library will be described in detail below based on the module combination mode in Embodiment 1.
[0050] According to the physical characteristics of the weight and center of gravity of the hull 1, a simulation experiment is carried out when designing the hull 1 to obtain the corresponding external force required by the robot in different speed ranges, so as to determine the corresponding paramet...
Embodiment 3
[0061] Further, in the current water environment, the water flow speed is fast, the wind and waves are greatly affected, or the water area robot is affected by obstacles, and the driving route is non-linear, based on the combination of modules in Example 2, the left and right During the execution of the initial control commands [W1, B1, W2, B2, A1, A2] by the right hydraulic brake module 6, after the left and right brake discs 15 complete the initial control commands [A1, A2], due to external influence and deviate from the target angle.
[0062] At this time, a feedback optimization step can be set on the water resistance brake module 6, and the control system 2 sends an advanced control command to the water resistance brake module 6; the advanced control command is when the information is [W1, B1, W2, B2 , A1, A2] after the initial control command is issued, the monitoring module 4 monitors the state information of the robot hull in real time and feeds it back to the control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More