

Resource joint optimization method for multi-target velocity estimation of distributed MIMO radar system
A radar system and speed estimation technology, applied in the field of MIMO radar, can solve problems such as different data transmission volume and computational complexity, limited transmission power, and affect task execution effect, so as to achieve good practical application value, improve tracking accuracy, and improve tracking performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
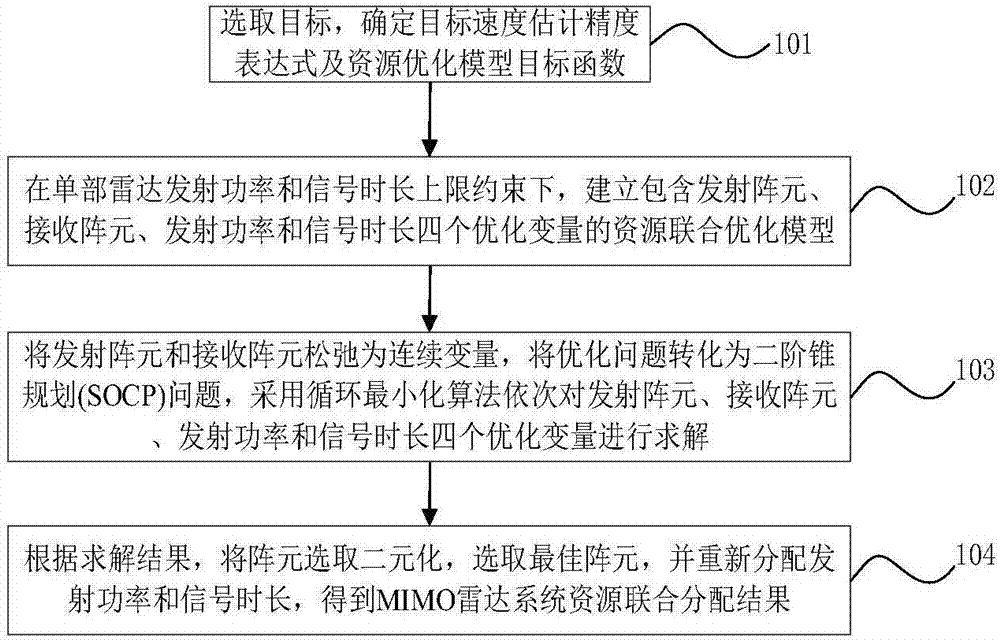
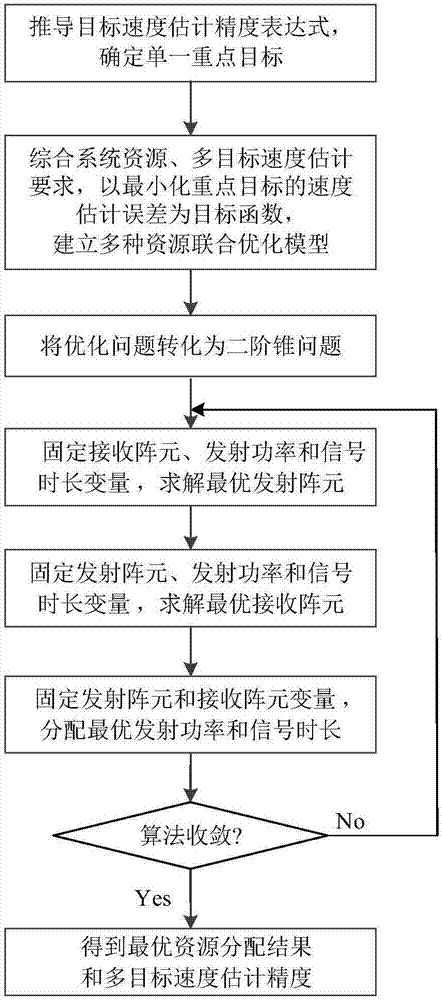
[0044] Embodiment two, see figure 2 As shown, a resource joint allocation method for multi-target velocity estimation in a distributed MIMO radar system specifically includes the following steps:
[0045] Step 1: Select a key target q * , calculate the target speed estimation accuracy expression, and use it as the objective function of the resource optimization model.
[0046] The distributed MIMO radar system contains M transmitting radars and N receiving radars. The radar interval is large enough to track Q moving targets. In a two-dimensional plane, the coordinates of the transmitting radar are The receiving radar coordinates are The target position state is (x q ,y q ),q=1,...Q, the speed state is Assume that each radar transmits an orthogonal signal s m (t), m=1,...M, satisfy T m is the signal duration, τ 0 for the signal delay. Define the transmit power vector of the radar as p=[p 1 ,p 2 ,...,p M ] T , the signal duration vector is t=[t 1 ,t 2 ,.....
Embodiment 3
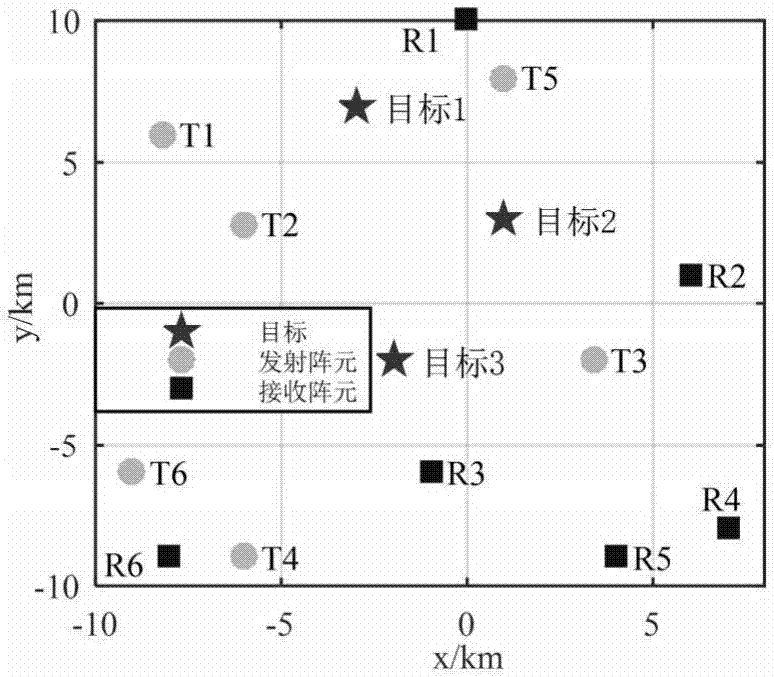
[0096] 1) Simulation conditions:
[0097] Considering the distributed MIMO radar platform with M=6, N=6, in the experimental scene of 20×20km, the velocity estimation of Q=3 moving targets is analyzed. The maximum number of transmitting and receiving array elements allowed to be selected by the radar system is Kt=4, Kr=4 respectively. The total transmission power of the system is P total =6kw, the upper limit of the transmitting power of a single radar is p max =4kw, the total duration of the signal is T total = 0.6s, the upper limit of the signal transmission time of a single radar is t max = 0.4s. Assuming that target 1 is always the key target in the objective function, MSE is the speed estimation requirement of the system for target 2 and target 3. In this paper, four resource allocation algorithms are considered to estimate the target speed, which are the selection of transceiver elements, the joint allocation of array element selection and transmit power, the joint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More