

Positioning method for sub-pixel at center of line laser in three-dimensional laser scanning system
A sub-pixel positioning and scanning system technology, applied in the field of sub-pixel positioning, can solve problems such as unsatisfactory real-time performance, high algorithm complexity, slow detection speed, etc., and achieve the effects of deburring, strong suppression ability, and narrow width
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
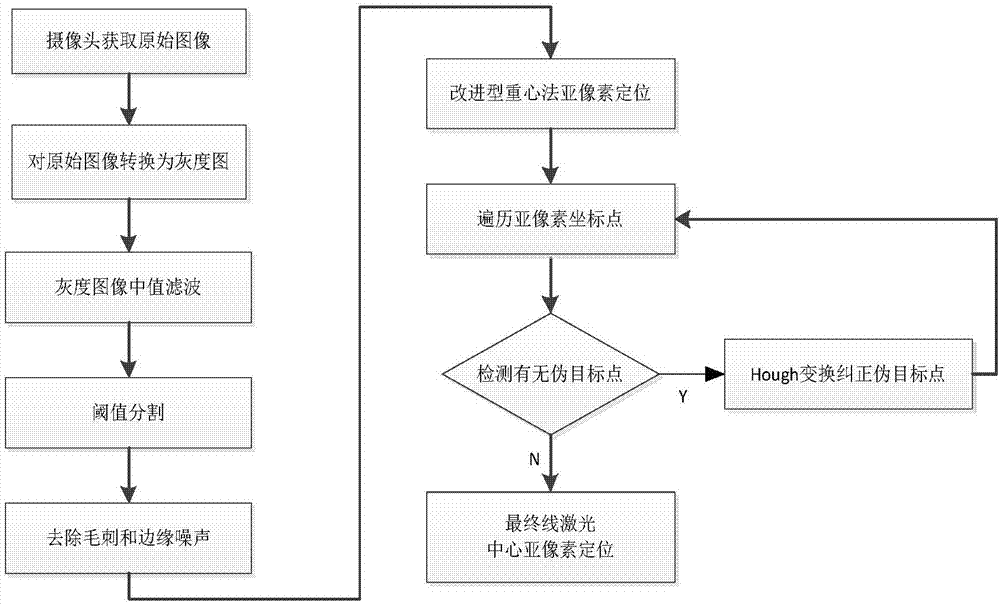
[0067] Such as figure 1 As shown, the present invention provides a sub-pixel positioning method for the line laser center in a three-dimensional laser scanning system, which combines the improved center of gravity method and Hough transform to realize the sub-pixel precise positioning of the line laser center, specifically including the following steps:
[0068] (1) Obtain the original image information of laser scanning from the camera, and preprocess the original image to eliminate the noise in the image;
[0069] Specifically include the following:
[0070] a) The purpose of image preprocessing is to reduce the influence of noise on the extracted line laser center and retain useful image information. In the image preprocessing process, because the color image contains more color information, the processing speed is relatively slow, so...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More