

GNSS/ODO-based dual-wheel differential positioning method for robot
A positioning method and robot technology, applied in the field of robotics, can solve problems such as poor variability and maintainability, and are easily affected by the environment, and achieve the effects of improving orientation accuracy, reducing costs, and speeding up mapping efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0039] Referring to the accompanying drawings, a GNSS / ODO-based robot dual-wheel differential positioning method includes the following steps:
[0040] A. Initialize the robot, and use GNSS to obtain the pose information of the robot at the initial moment;
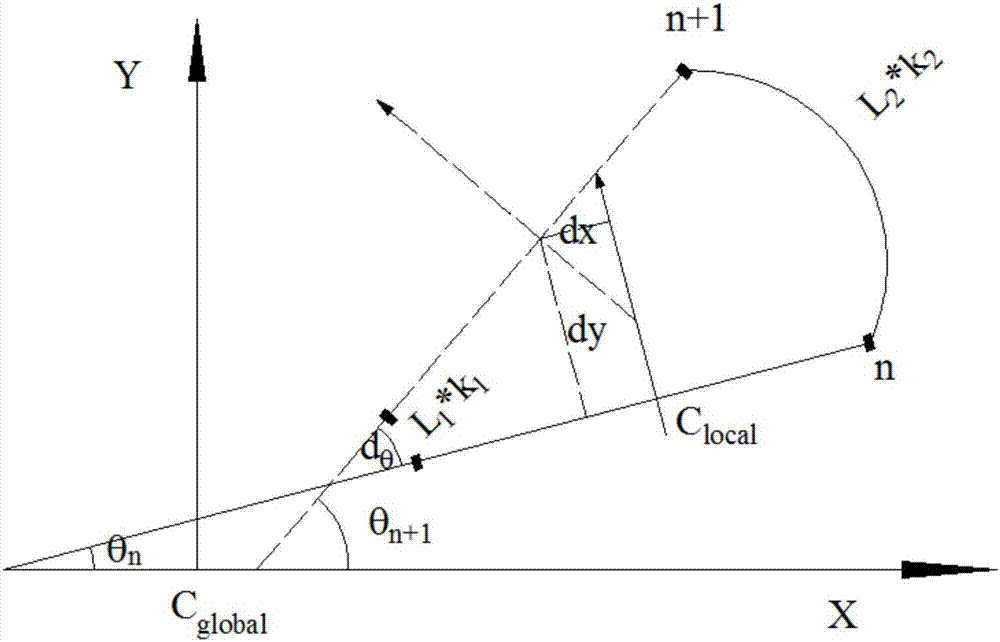
[0041] Assuming that the current moment is n, the global pose information of the robot at this moment is given by [x g (n),y g (n), θ g (n)] description, where, [x g (n),y g (n)] represents the plane coordinate position of the robot in the global coordinate system, θ g (n) represents the heading angle of the robot; let L 1 , L 2 respectively represent the mileage change of the left and right wheels of the robot measured by the two-wheel odometer per epoch, then the angle dθ that the robot turns at two adjacent moments g and the plane position in the robot body coordinate system (dx l ,dy l ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More