

Genetic ant algorithm-based unmanned aerial vehicle global path planning method
A technology of global path planning and ant algorithm, applied in the field of intelligent algorithm of unmanned autonomous underwater vehicle, can solve the problem that the hybrid algorithm does not make full use of path planning, so as to reduce the amount of calculation and storage, improve efficiency, and improve search efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further illustrated below in conjunction with the accompanying drawings and specific embodiments. It should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention. After reading the present invention, those skilled in the art all fall into the appended claims of the present application to the amendments of various equivalent forms of the present invention limited range.
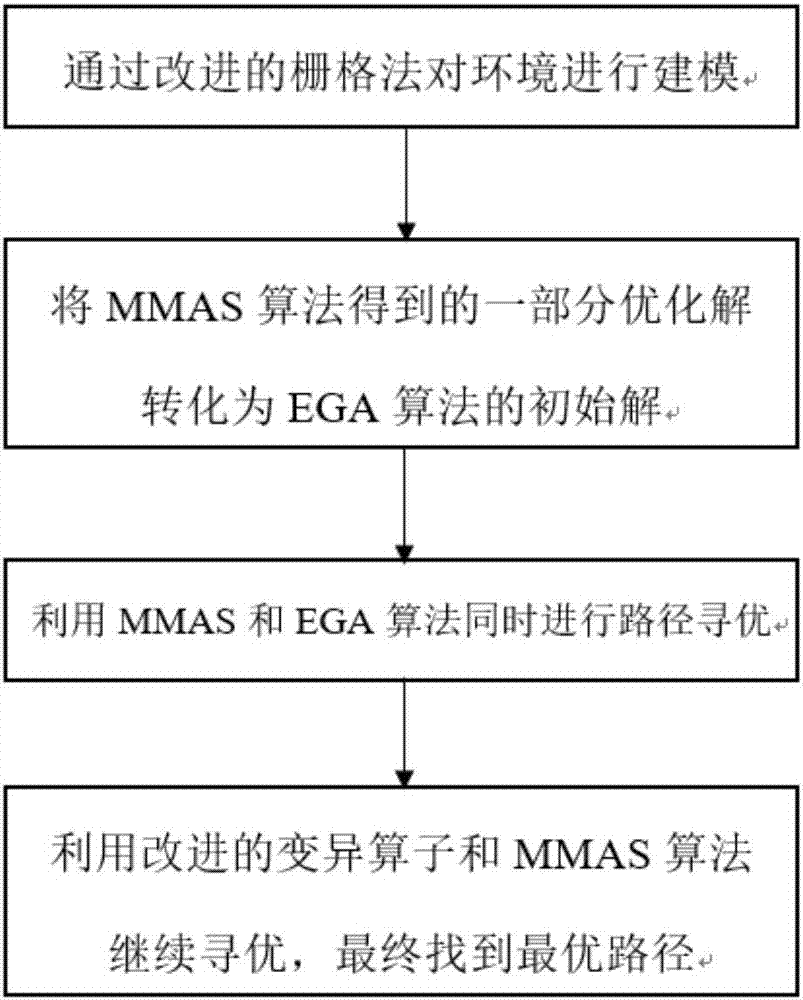
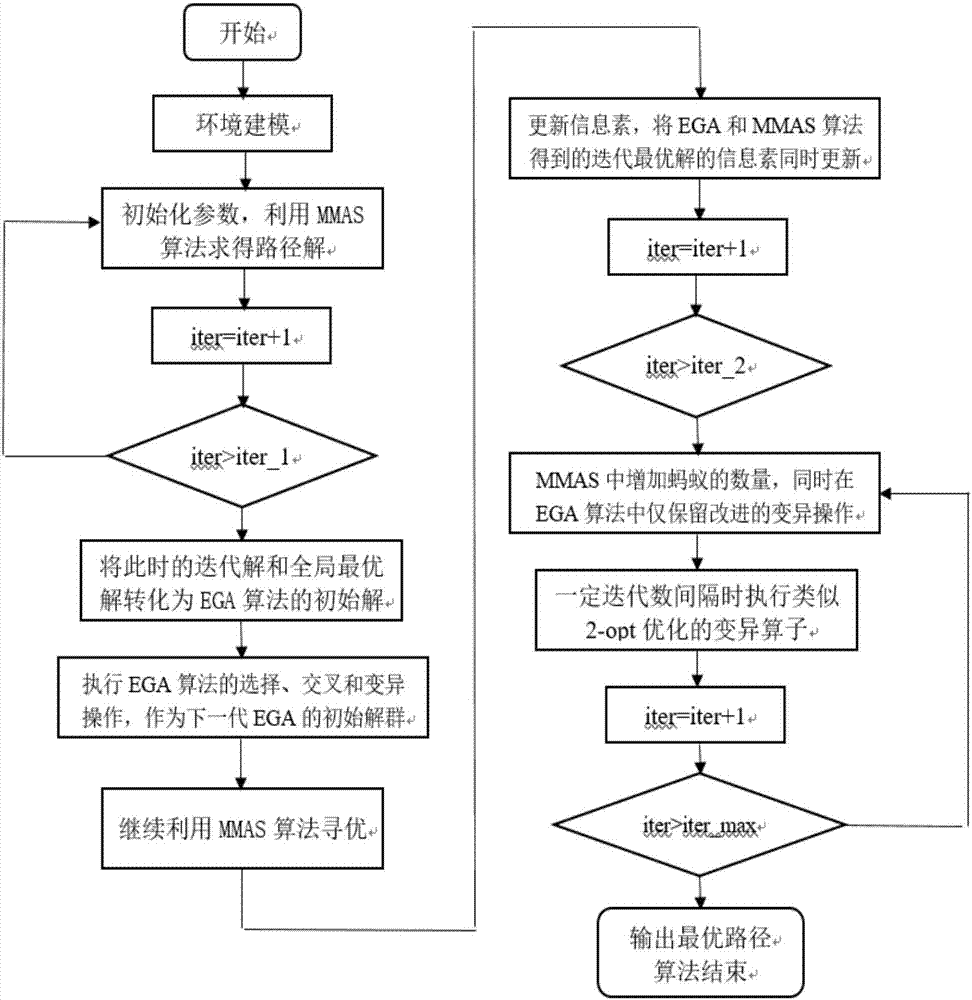
[0043] The working principle of the AUV path planning method of the present invention: in a large space, the quality of the initial solution of the ant algorithm is significantly improved compared with the genetic algorithm, and the global optimal solution of the MMAS algorithm will quickly converge in the early stage of simulation, so the use of MMAS in the initial stage of the algorithm can quickly Improve the quality of the solution; after transferring to the EGA algorithm, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More