

Rope-driven multi-degree-of-freedom series manipulator and driving method thereof
A rope-driven, degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effects of improving motion performance and dynamic response, reducing load, and reducing mass and volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The present invention will be further described below in conjunction with the accompanying drawings.
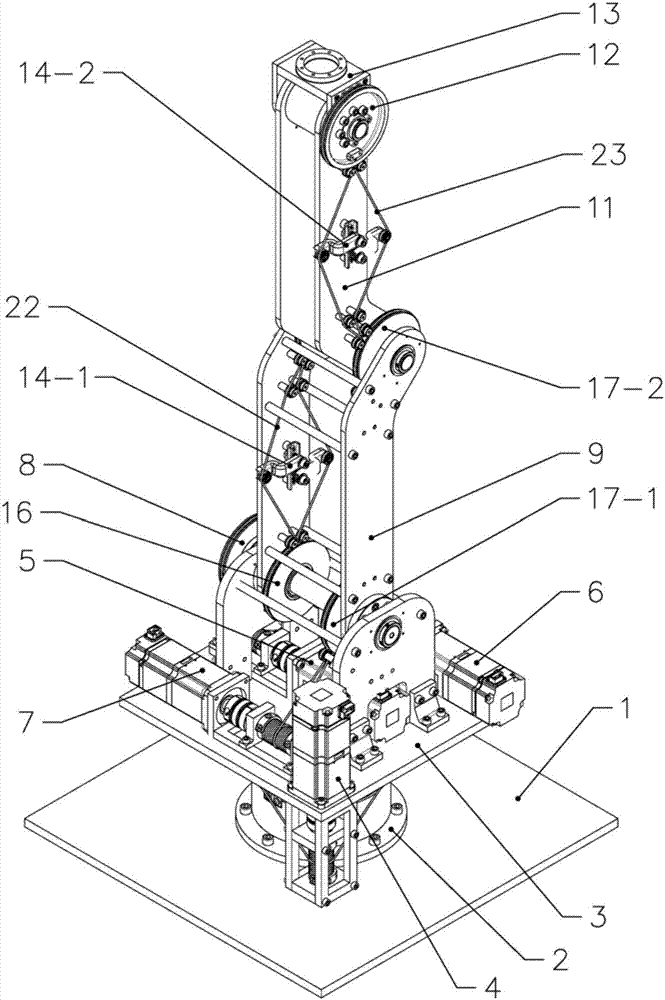
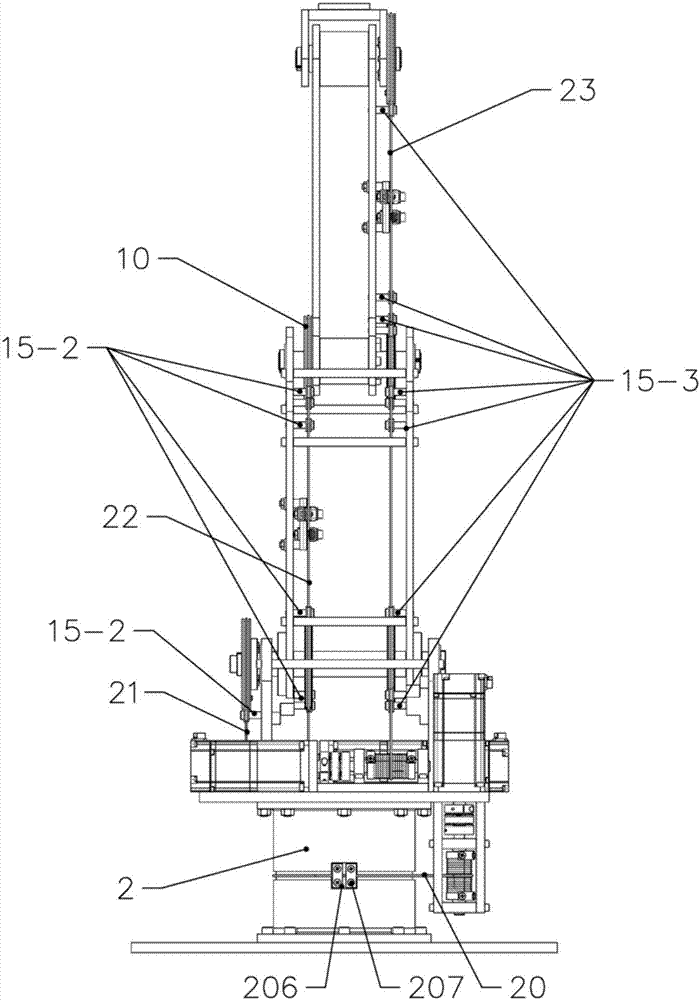
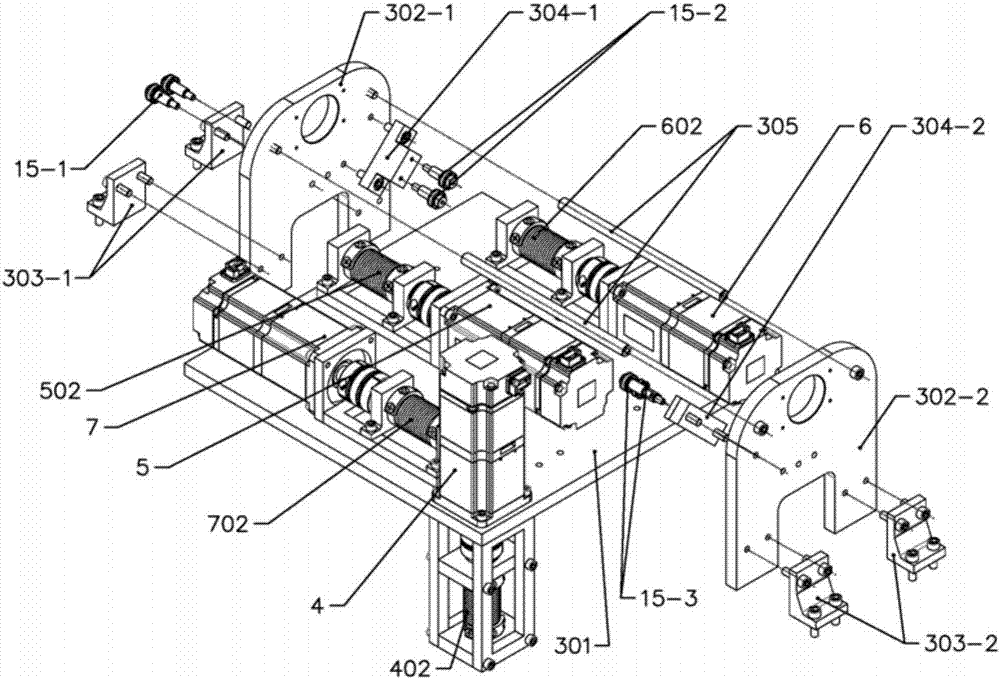
[0077] refer to figure 1 and figure 2 As shown, the present invention discloses a rope-driven multi-degree-of-freedom series robot arm, including: a base plate 1, a waist unit 2, a waist platform 3, a waist drive unit 4, a small arm drive unit 5, a big arm drive unit 6, End drive unit 7, upper arm joint driven wheel 8, upper arm unit 9, forearm joint driven wheel 10, forearm unit 11, end joint driven wheel 12, end platform unit 13, forearm rope tensioning device 14-1 , end rope tensioning device 14-2, big arm guide pulley 15-1, forearm guide pulley 15-2, end guide pulley 15-3, big arm joint pulley 16, first forearm joint pulley 17-1, the first forearm joint pulley 17-1, Two forearm joint pulley 17-2, waist rope 20, big arm rope 21, forearm rope 22, end rope 23 etc. The waist unit 2 has a vertical rotation degree of freedom, and the big arm unit 9 , the small arm un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More