

Method for assembling SCARA robot through digital image processing technology
A technology of digital images and assembly methods, applied in image data processing, image enhancement, image analysis and other directions, can solve the problems of robots not being able to adapt in time, limiting the flexibility and work efficiency of industrial robots, and task failures, achieving improved adaptability, The effect of improving production efficiency and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is described in detail below in conjunction with accompanying drawing.
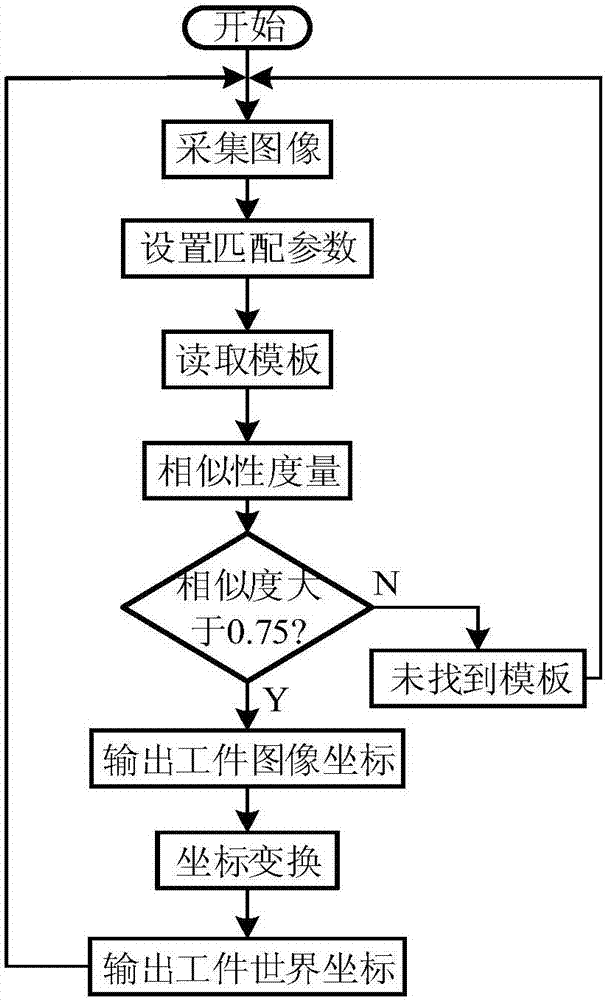
[0026] Such as figure 1 Shown: a kind of SCARA robot assembly method utilizing digital image processing technology, comprises the following steps:
[0027] Step1. Install the industrial camera, install the camera directly above the working area of the robot, and adjust the focal length of the camera so that the entire working area is within the field of view of the camera;
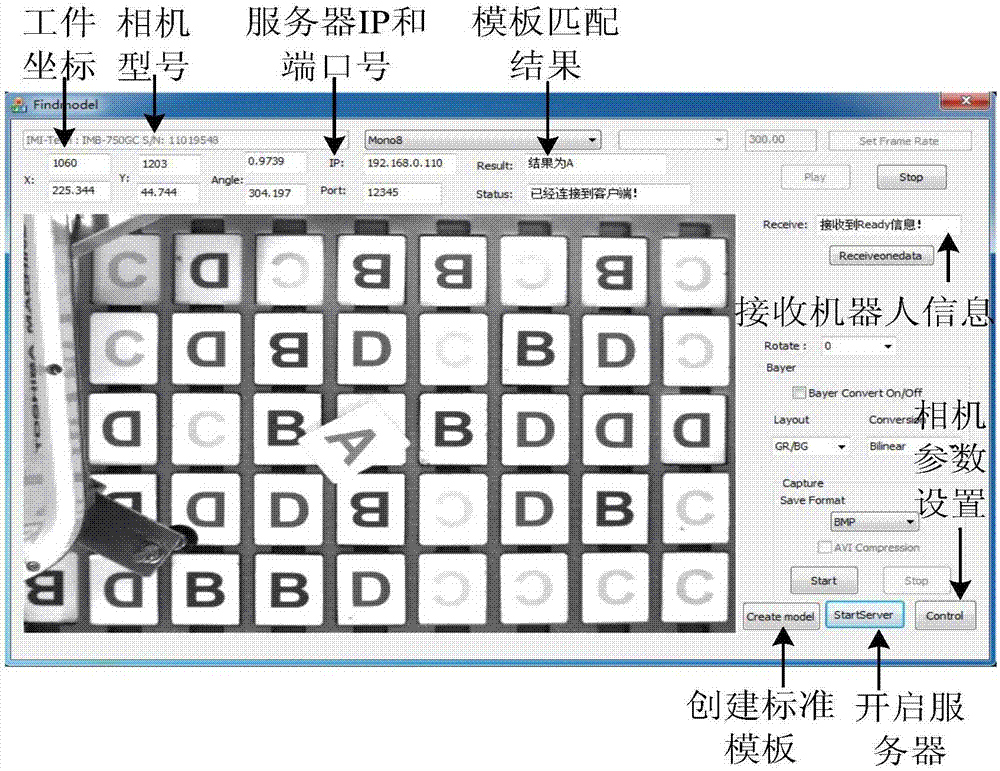
[0028] Using the Korean IMI tech Amazon2 series industrial camera, in the case of including the camera class library, read the data of the camera by instantiating the camera handle class, and use the OneFrameGrab function to obtain a frame of image data of the camera and save the data, and then use the Halcon The reading function read_image is used to read the saved data and get an image, thus realizing the online reading function of the camera with Halcon;
[0029] Step 2. Camera calibration mainly us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More